El pasado 21 de marzo de 2020 se celebró el Arduino Day, puesto que en España y en otros países estábamos en cuarentena, los eventos se celebraron on-line.
Este vídeo es un directo en Youtube que hice justo antes del Streaming oficial de Arduino.
Nuestro patrocinador Electrónica de Luis nos trajo los kits para montar los robots y los kits de la Open Led Race y Twang32 que vamos a usar en el Arduino Day.
Aun nos queda por añadir algún evento y charlas de invitados al evento, que iremos informando cuando se vayan confirmando.
Este año vamos a hacer una zona de feria/exposición donde están invitadas academias de robótica, colegios e institutos, empresas, etc… que quieran mostrar lo que hacen con Arduino y también haremos una zona de juegos hechos con Arduino.
Este tutorial de construcción y programación de un robot minisumo para competiciones de minisumo está motivado por el Taller de construcción de Robot Minisumo celebrado el 15 de marzo del 2019 en el CEIP Obispo Blanco dentro del Arduino Day 2019 de Logroño https://www.aprendiendoarduino.com/talleres-arduino/arduino-day-logrono-2019/ y el posterior taller de perfecionamiento celebrado el 9 de mayo en el Área UR-Maker de la Universidad de La Rioja
Con el objetivo de acercar la robótica y la programación a los niños, proponemos un taller donde fabricar y programar un robot de sumo autónomo. El hardware y el software para fabricarlo y programarlo es libre y abierto. Los robots de sumo competirán por pares en un dohyo (tablero circular). El robot ganador será el que logre sacar a su contrincante fuera del dohyo.
También aprovechamos este taller para preparar los robots de minisumo para la competición en el 1er encuentro maker en tierra de Estella: https://encuentromaker.dictelweb.org/
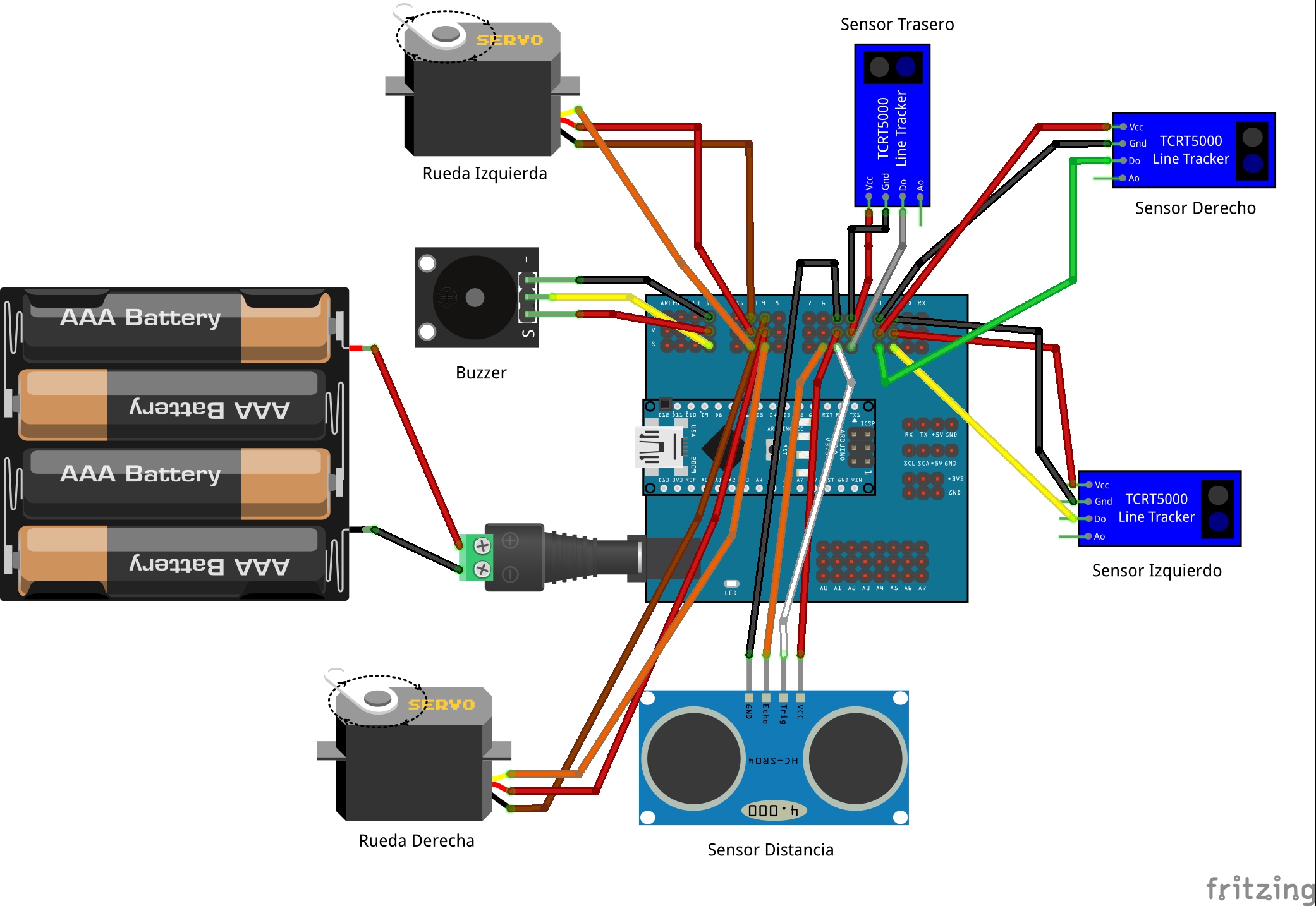
El chasis impreso en 3D consiste en dos piezas, en la pieza inferior se coloca el portapilas y los tres sensores IR TCRT5000 sujetos con tornillos. Luego se colocan los dos servos con las ruedas y el sensor de distancia ultrasónico HC-SR04 en los huecos a tal efecto.
Sobre la pieza superior se coloca la placa de expansión de Arduino nano y el Arduino ya instalado.
Una vez todo colocado, se conectarán los cables usando los jumpers dupont.
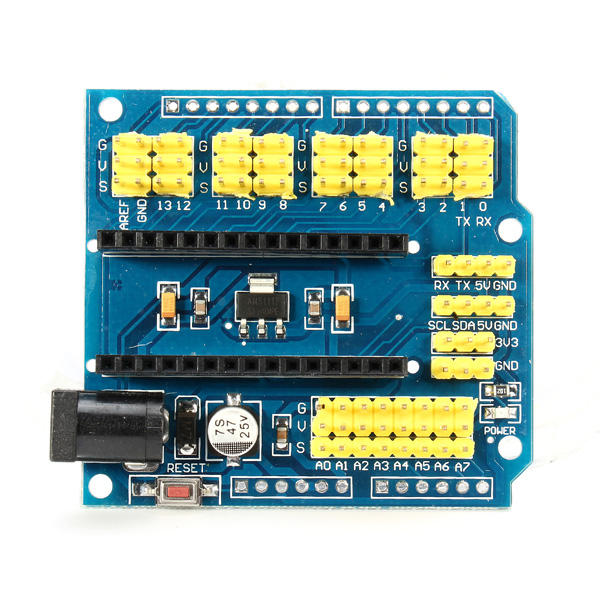
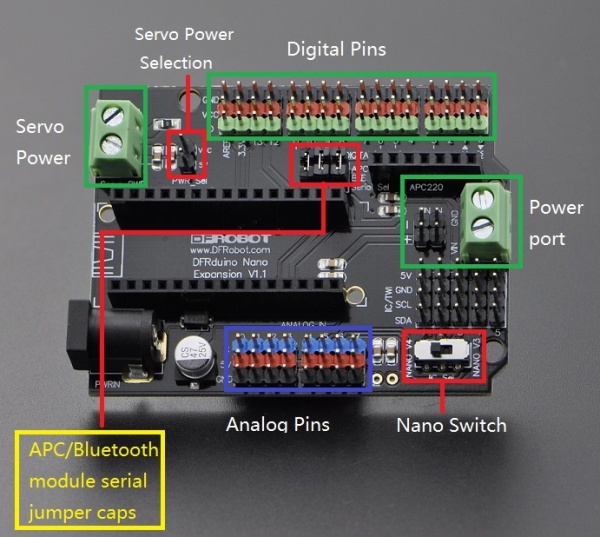
La parte principal para las conexiones es la Arduino Nano Expansion Board. Esta placa dispone de una expansión de los puertos del Arduino Nano junto con un pin de VCC y otro de GND para cada pin del Arduino.
Para la programación se ha usado la versión 3.4.12 de mBlock y no ha sido necesario instalar ninguna extensión.
Para programar es necesario usar el modo Arduino, que se selecciona desde edit – Arduino Mode. Si se usa un Arduino Nano, en boards poner Arduino UNO, si se selecciona Nano (mega328) no funciona.
En caso que no cargue, comprobar si el Arduino Nano tiene el bootloader viejo, en ese caso habrá que actualizar el bootloader o sino usar el IDE de Arduino y usar el bootloader antiguo como se explica en el siguiente punto.
La primera parte de la programación es hacer las funciones básicas y ponerlas todas en un código de test que compruebe que funcionen los motores y todos los sensores y buzzer.
Funciones básicas a programar:
Marcha adelante
Marcha Atrás
Gira derecha
Gira Izquierda
Para
Pita (se pueden hacer diferentes tonos para identificar qué hace, por ejemplo inicio, detecta linea, detecta oponente, etc…)
Detecta distancia
Detecta linea (diferencia entre derecha, izquierda y trasero)
Los bloques de funciones básicas quedan así:
En mi caso en lugar de poner 0 y 180 para máxima velocidad de los servos (giro izda. y dcha.) he puesto 15 y 165 que funciona mejor.
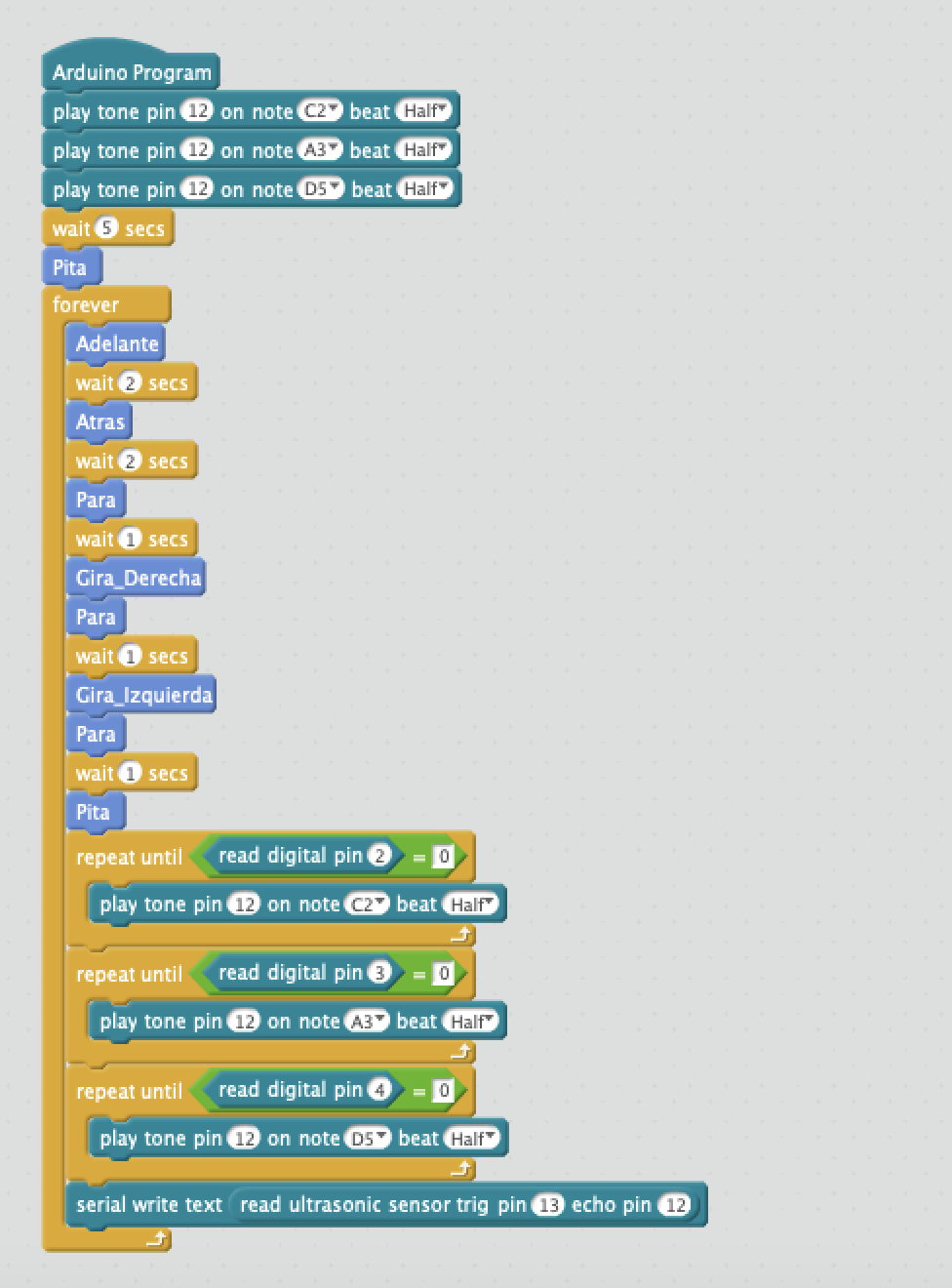
El código de prueba es:
Este código comprueba el correcto funcionamiento de los motores y los movimientos, así como el buzzer y los sensores IR de suelo y el sensor de distancia ultrasónico.



















{kind=link}