Hardware Arduino
Arduino es una plataforma para prototipado de electrónica basada en hardware y software libre y fácil de utilizar. Podemos construir circuitos electrónicos y programarlos con esta placa.
Realmente lo que estamos haciendo es programar un microcontrolador, estos dispositivos electrónicos programables nos rodean en nuestro día a día, en el coche, nuestra casa, el trabajo, etc…

Las principales características que podemos encontrar en nuestra placa de Arduino UNO son las siguientes:
- El microcontrolador es un circuito integrado programable capaz de realizar operaciones matemáticas complejas a gran velocidad.
- La alimentación de una placa de Arduino es mediante el puerto USB mientras se está programando. Una vez programado podemos desconectarlo del ordenador y que trabaje de forma autónoma y se alimenta Arduino mediante una fuente de alimentación o pila de 9V.
- Tanto las entradas como las salidas dotan al sistema de información y realizan diferentes actuaciones.
Arduino contiene la siguiente distribución de pines:
- Disponemos de 14 pines digitales que pueden ser configurados como entradas o salidas, de los cuales (serigrafiadas con el símbolo ~) pueden ser utilizados como señales digitales PWM 6 pines.
- Igualmente disponemos de 6 pines analógicos serigrafiadas desde A0 hasta A5 para las entradas analógicas.
- También disponemos de 3 pines GND para conectar a tierra nuestros circuitos.
- Y por último 2 pines de alimentación de 5V y 3.3V respectivamente.

Para saber más:
Sensores
Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas.
- Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, movimiento, pH, etc.
- Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad o un sensor capacitivo), una tensión eléctrica (como en un termopar), una corriente eléctrica (como en un fototransistor), etc.
Un sensor nos va a poder medir/leer las variables ambientales de nuestro entorno para poder tomar decisiones en función de los cambios en el entorno.
Ejemplos de sensores. Kits Arduino: http://www.robotshop.com/en/37-modules-sensor-kit-arduino.html
Listado de componentes: http://tienda.bricogeek.com/upload/datasheets/SEN-0060/37-en-1-especificaciones.pdf

Actuadores
Un actuador es un dispositivo capaz de transformar energía hidráulica, neumática o eléctrica en la activación de un proceso con la finalidad de generar un efecto sobre elemento externo. Este recibe la orden de un regulador, controlador o en nuestro caso un Arduino y en función a ella genera la orden para activar un elemento final de control como, por ejemplo, una válvula.
Existen varios tipos de actuadores como son:
- Electrónicos
- Hidráulicos
- Neumáticos
- Eléctricos
- Motores
- Bombas
En determinadas ocasiones, necesitamos un “driver” o manejador para poder mandar órdenes desde Arduino.
- Recordad que los pines de Arduino solo pueden manejar un máximo de 40mA y recomendable usar 20mA de forma continua.
- Recordar que Arduino solo puede manejar un total de 200 mA de salida. Es decir que la corriente máxima que admite Vcc y GND son 200 mA.

Un actuador nos permite interactuar con el entorno.
Periféricos
Periférico es la denominación genérica para designar al aparato o dispositivo auxiliar e independiente conectado a la unidad central de procesamiento o en este caso a Arduino. Se consideran periféricos a las unidades o dispositivos de hardware a través de los cuales Arduino se comunica con el exterior, y también a los sistemas que almacenan o archivan la información, sirviendo de memoria auxiliar de la memoria principal.
Ejemplos de periféricos:
- Pantallas LCD
- Teclados
- Memorias externas
- Cámaras
- Micrófonos
- Impresoras
- Pantalla táctil
- Displays numéricos
- Zumbadores
- Indicadores luminosos, etc…

En ocasiones para usar un periférico con Arduino, necesitamos un “driver” o manejador para poder mandar órdenes desde Arduino.
Shields Arduino
Las shields son placas de circuitos modulares que se montan unas encima de otras para dar funcionalidad extra a un Arduino. Esta Shields son apilables.

Existen miles de shields en función de lo que necessitemos: http://shieldlist.org/
Shields Educativos
Uno de los problemas que se encuentran a la hora de impartir un curso de electrónica y programación con Arduino en los colegios es la dificultad de comprobar los montajes de los circuitos de los alumnos. Sobre todo cuando se trata de los más pequeños.
Existen shields educativos que facilitan el trabajo en el aula. Son shields que o bien permiten conectar y listo o bien tienen varios componente integrados que evitan hacer cableados y no tener que saber de electrónica.
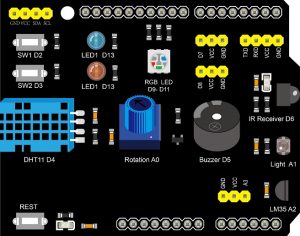
Shield Educativo Multifunción
Shield educativo + mblock https://www.prometec.net/blog-shield-educativo-multifuncion/
Echidna
EchidnaShield es un proyecto Open Source dirigido a facilitar el aprendizaje de la programación de sistemas físicos en los últimos cursos de Primaria y en Secundaria. Con este fin se ha diseñado un escudo para Arduino, pensando en su uso con entornos visuales de programación. El escudo está apoyado en una guía educativa con propuestas de actividades para el aula.

Toda la información en: http://echidna.es/
BQ Zum Kit
Web: https://www.bq.com/es/zum-kit
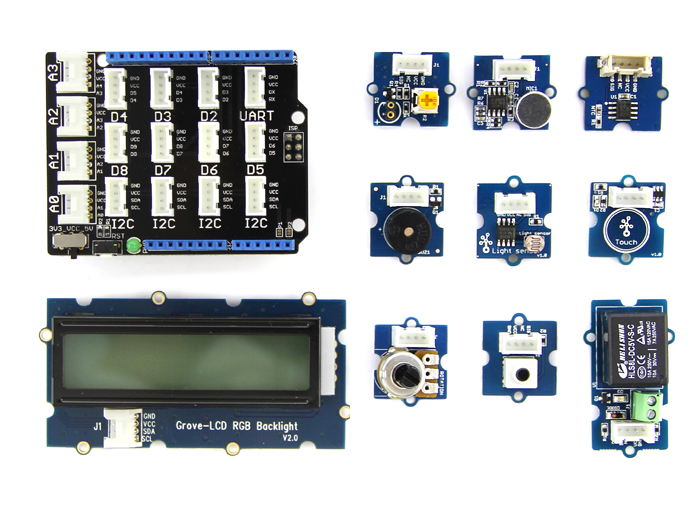
Grove Starter Kit
Web: https://www.seeedstudio.com/Grove-Starter-Kit-for-Arduino-p-1855.html
Grove System: http://www.seeedstudio.com/wiki/GROVE_System
Wiki: http://www.seeedstudio.com/wiki/Grove_-_Starter_Kit_v3
Kit conectar y listo: http://www.electan.com/arduino-shield-kit-modulos-conectar-listo-p-2987.html
Makey Makey
MaKey MaKey es una placa de circuito impreso con un microcontrolador ATMega32u4 que ejecuta el firmware de Arduino Leonardo. Utiliza el protocolo de dispositivos de interfaz humana (HID) para comunicarse con el ordenador, y puede enviar pulsaciones de teclas, clics del mouse y movimientos. Para detectar un circuito cerrado en los pines de entrada digital, usa switches de alta resistencia para que sea posible cerrar un interruptor incluso a través de materiales como la piel, hojas y play-doh. Usa una resistencia de pull-up de 22 mega ohms. Esta técnica atrae el ruido en la entrada, pero usa promediador para reducir el ruido mediante software, ahorrando dinero en el filtrado por hardware. Hay seis entradas en la parte frontal de la placa, que se pueden unir a través de conectores tipo cocodrilo o cualquier otro método que se te ocurra. Hay otras 12 entradas en la parte posterior, 6 para las teclas del teclado y 6 para el movimiento del mouse, a las que se puede acceder usando jumpers, clips o conectores de tipo cocodrilo de forma creativa alrededor de los conectores.

Más información:
Avanzado de Makey Makey
Firmware de Makey Makey: https://github.com/sparkfun/MaKeyMaKey/tree/master/firmware/Arduino/makey_makey
Repositorio Makey Makey: https://github.com/sparkfun/MaKeyMaKey
Web donde comprar: https://www.ro-botica.com/
Picuino
Picuino es una plataforma de hardware y software que facilita el desarrollo sencillo de proyectos interactivos.
Picuino: http://www.picuino.com/
NanoPlayBoard
NanoPlayBoard es un Shield educacional para Arduino Nano hecha en Almería.
Web del proyecto: http://nanoplayboard.org/
NanoPlayBoard tiene una librería ya configurada en la que está todo el código necesario para llevar a cabo esos experimentos básicos.

Una placa open sourece con muchas posibilidades:
littleBits
littleBits es una empresa con sede en la ciudad de Nueva York que hace una biblioteca de código abierto de electrónica modular, que consiste en juntar piezas con pequeños imanes para la creación de prototipos. El objetivo de la compañía es democratizar el hardware de la misma forma que el software y la impresión se han democratizado. La misión de littleBits es «poner el poder de la electrónica en manos de todos y analizar tecnologías complejas para que cualquiera pueda construir, crear prototipos e inventar».
El kit de codificación little littlebits Arduino permite a los usuarios comenzar a crear inventos que se comunican con el software (Processing, MaxMSP, etc.), con el apoyo de instrucciones paso a paso, recursos útiles en línea y 8 bocetos de muestra (código prefabricado) incluido. Aprende las habilidades del futuro: codificación, ingeniería y creatividad.
Web: https://www.littlebits.com/










