Experimento avanzado: sobre la base del experimento básico, conectar una entrada digital para mandar órdenes remotas (pulsador) y dos salidas digitales (leds rojo y Amarillo) para recibir órdenes remotas en base a unas alarmas, mediante una plataforma IoT propia diseñada y programada con Node-RED.
De forma más avanzada usando una plataforma IoT desarrollada con Node-RED, permite más acciones y personalización, así como publicar los datos en una web pública accesible.
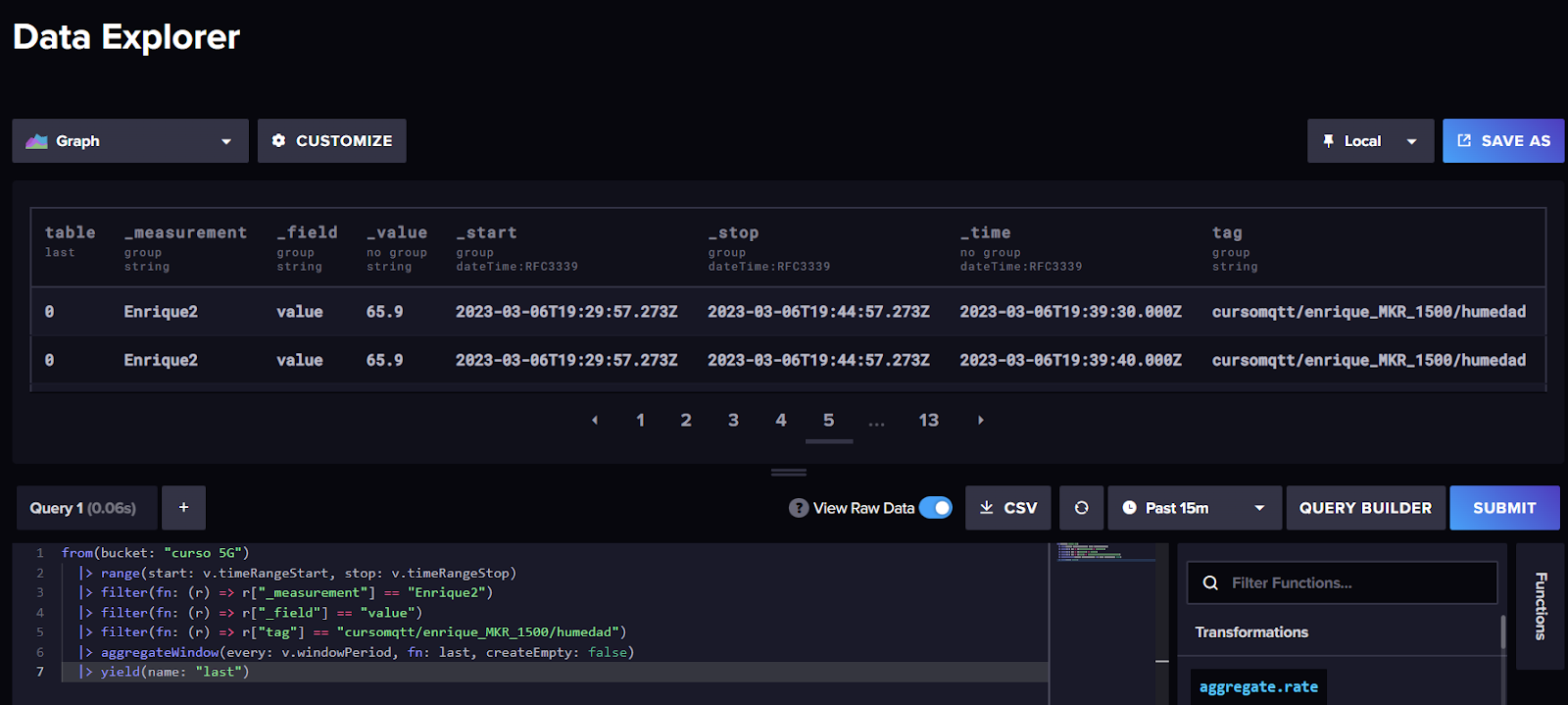
Se capturarán los datos de los sensores de temperatura, humedad e iluminación y se almacenarán en una Base de Datos InfluxDB: https://aprendiendonodered.com:8086
El stream de datos se analizará en tiempo real y se generarán unas alertas cuando se superen los siguientes umbrales:
- Temperatura > 22 ºC
- Iluminación < 500
Se programará la lógica, de forma que cuando la iluminación sea baja, se encenderá el led amarillo y cuando la temperatura sea alta se encenderá el led rojo, según los umbrales definidos anteriormente.
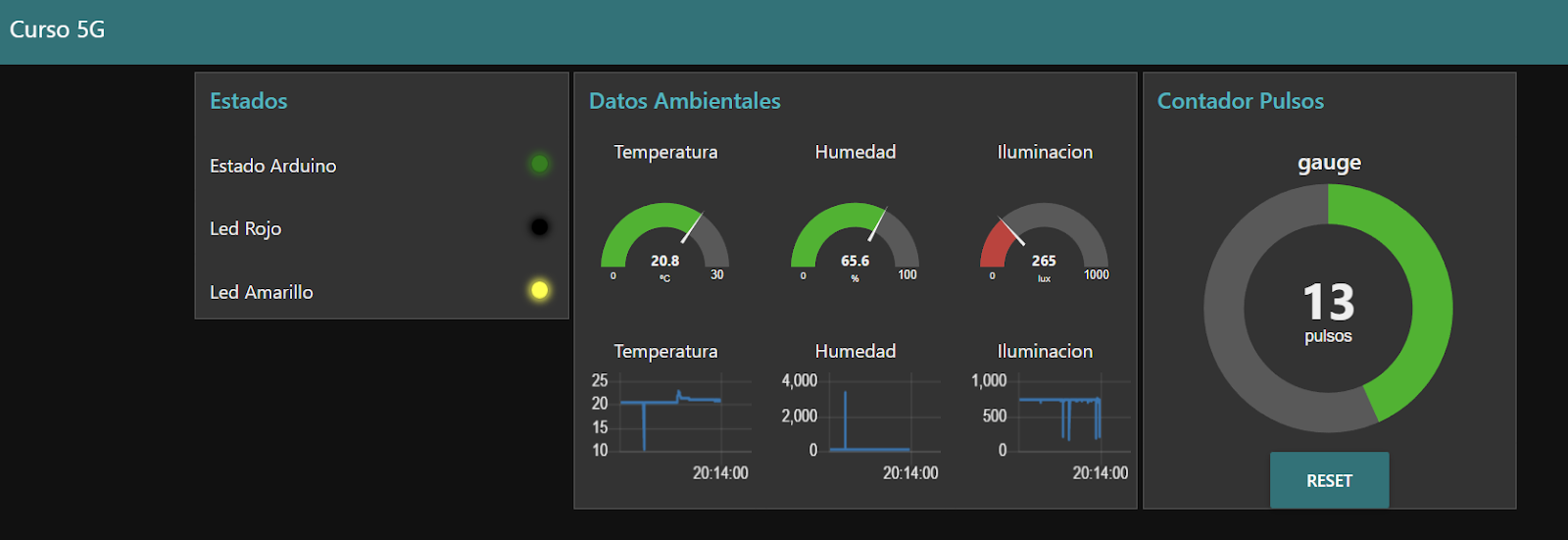
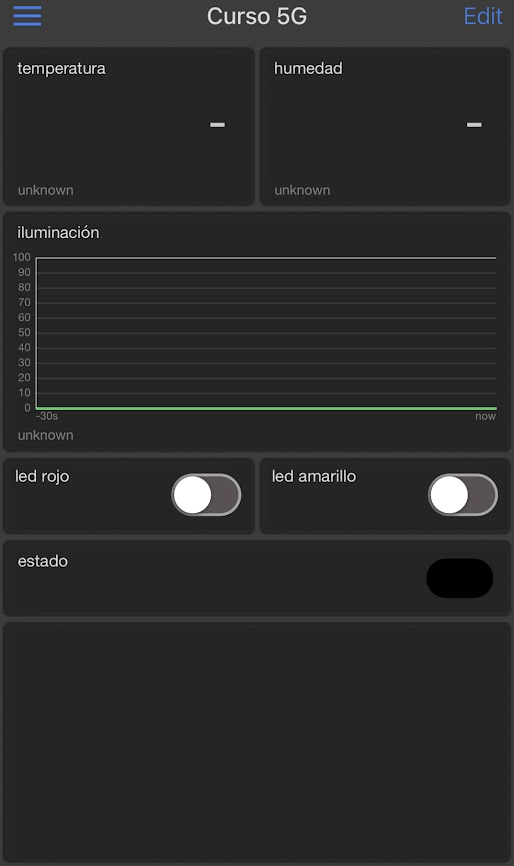
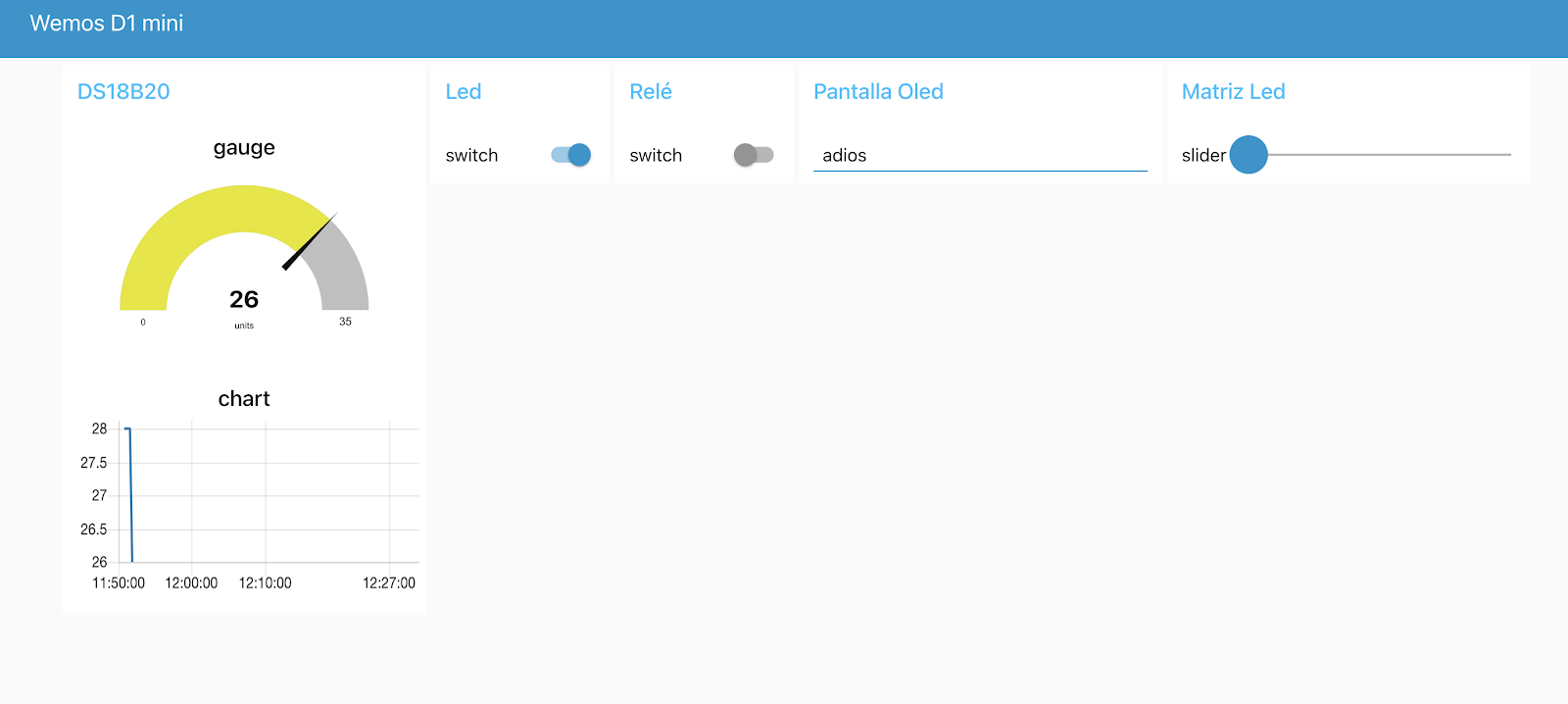
Además se mostrarán en el dashboard de la plataforma IoT desarrollada por los alumnos los siguientes datos:
- Gauge y gráfica últimos 30 minutos temperatura
- Gauge y gráfica últimos 30 minutos humedad
- Gauge y gráfica últimos 30 minutos iluminación
- Estado de los leds
- Contador con el número de veces que se pulsa el pulsador y un reset de contador.
- Estado del dispositivo
- Un switch para encender y apagar el led integrado
Ejemplo de ejercicio IoT con redes 5G, usando Arduino MKR1500 que tiene conectividad LTE-M.

Para el curso, usaremos esta tarjeta IoT https://1nce.com/en-us/1nce-connect que tiene activado para España tanto LTE-M como NB-IoT. Es imprescindible que cada alumno que asista al curso tenga una tarjeta de este tipo. Es posible comprar esta tarjeta en https://shop.1nce.com/portal/shop/ y tarda aprox. 5 días en llegar.
Repositorio: https://github.com/jecrespo/fundamentos-iot-5g
Cargar el código: https://github.com/jecrespo/fundamentos-iot-5g/blob/main/Experimento-Avanzado-NodeRED/Experimeto-Basico-MQTT.ino
Repositorio Node-RED: https://github.com/aprendiendonodered/EJERCICIO33_IOT_5G
Material para la práctica:
- 1x Arduino MKR NB 1500
- 1x tarjeta micro-sim de operador con red LTE-M con datos habilitados.
- 1 Breadboard/protoboard 400 points
- Un kit de 20 cables jumpers macho/macho
- Un sensor de temperatura DHT-22 o ds18b20 o Temperature sensor [TMP36]
- 1 Photoresistor [VT90N2 LDR]
- 2 LEDs (red)
- 1 Pushbutton
- 5 Resistors 220 Ohms
- 1 Resistor 10 KOhms
Alternativamente puede usarse uno de estos kits de Arduino:
- Freenove Basic Starter Kit for ESP8266 [2] con un precio de 20€: https://es.aliexpress.com/item/1005004522422238.html?gatewayAdapt=glo2esp con la guia paso a paso muy buena: http://freenove.com/fnk0075
- Freenove Basic Starter Kit for ESP32-WROVER [3] con un precio de 27€: https://www.amazon.es/Freenove-ESP32-WROVER-Contained-Compatible-Bluetooth/dp/B09BC1N9LL
Esquema de conexión:

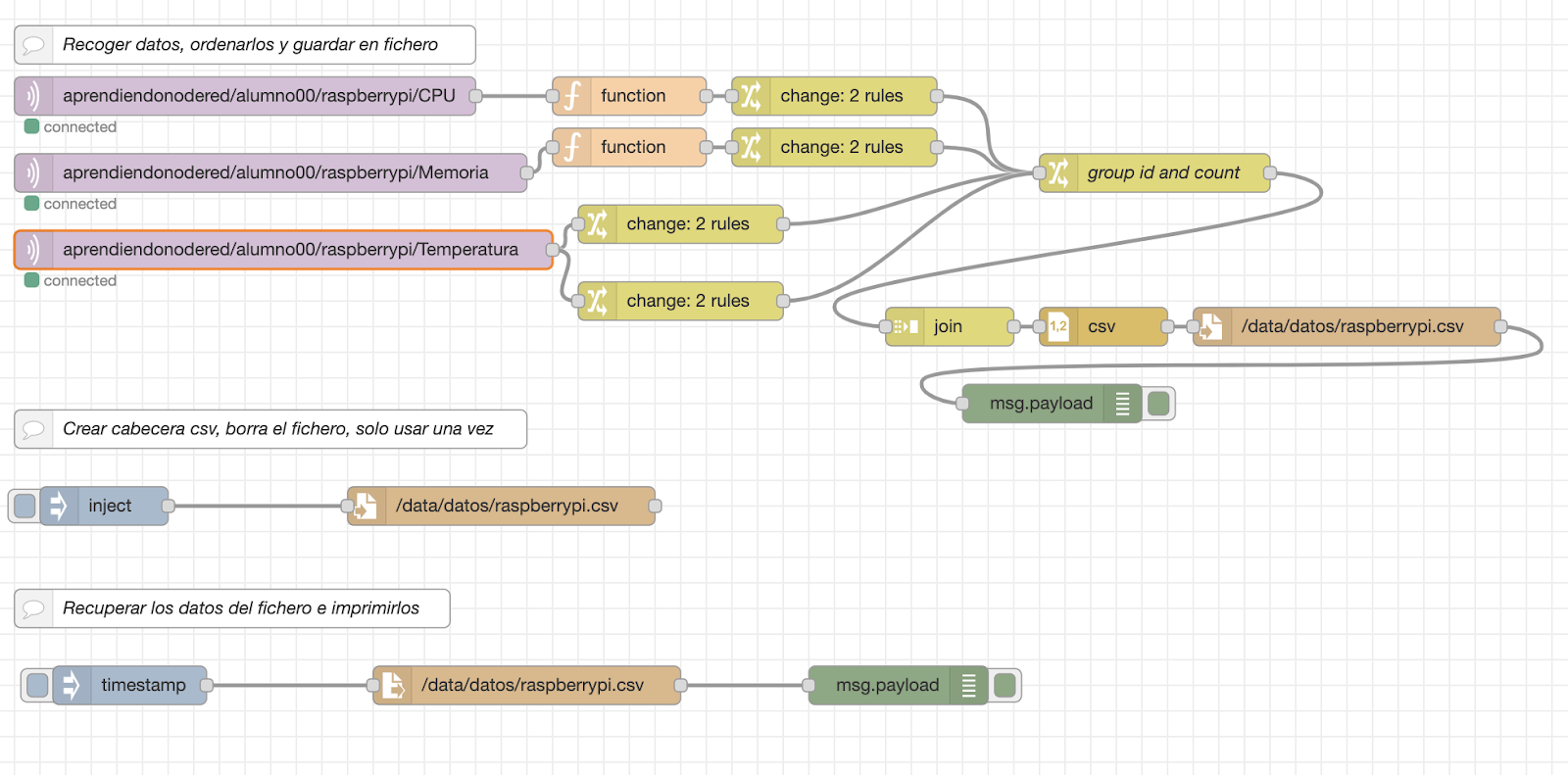
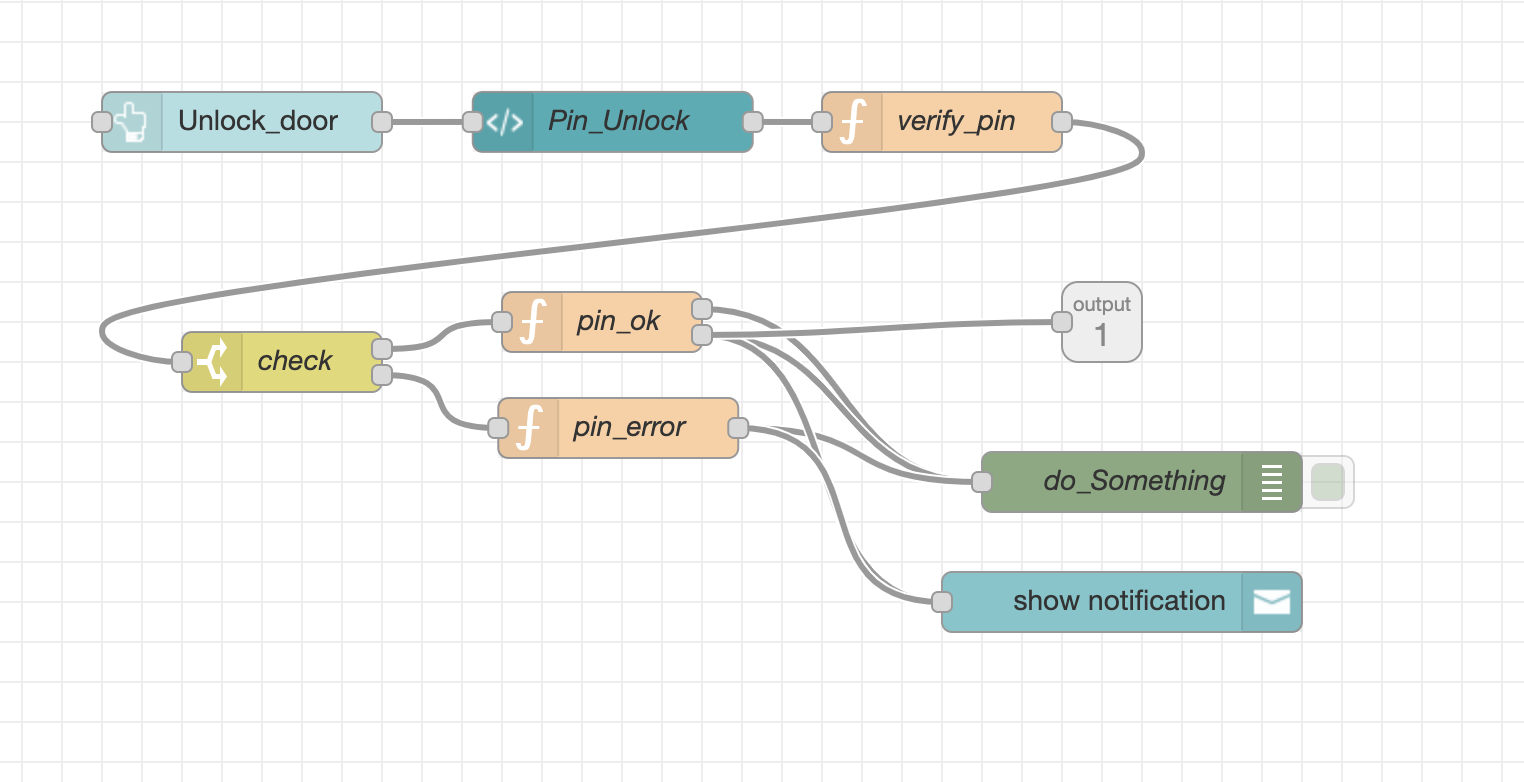
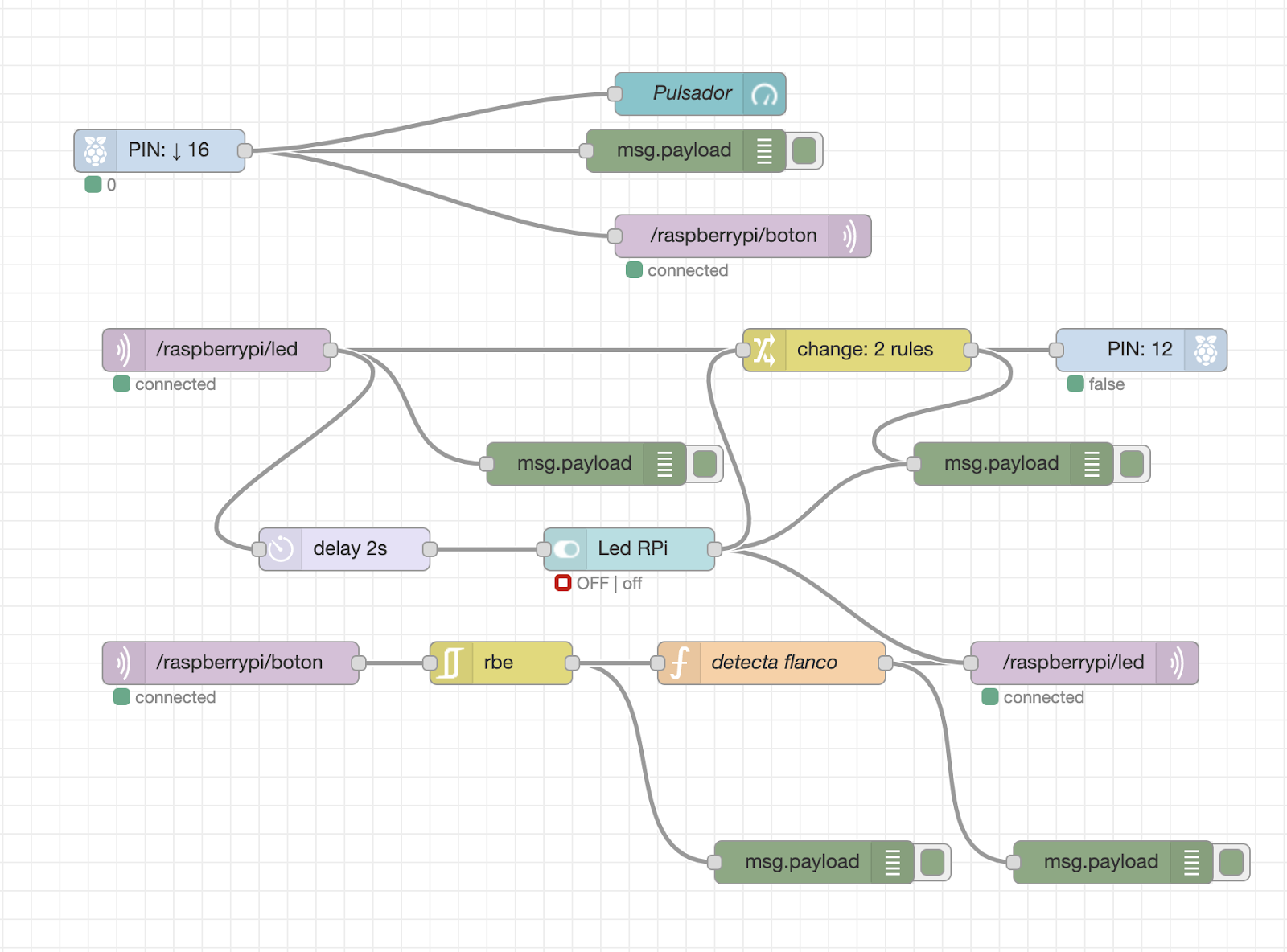
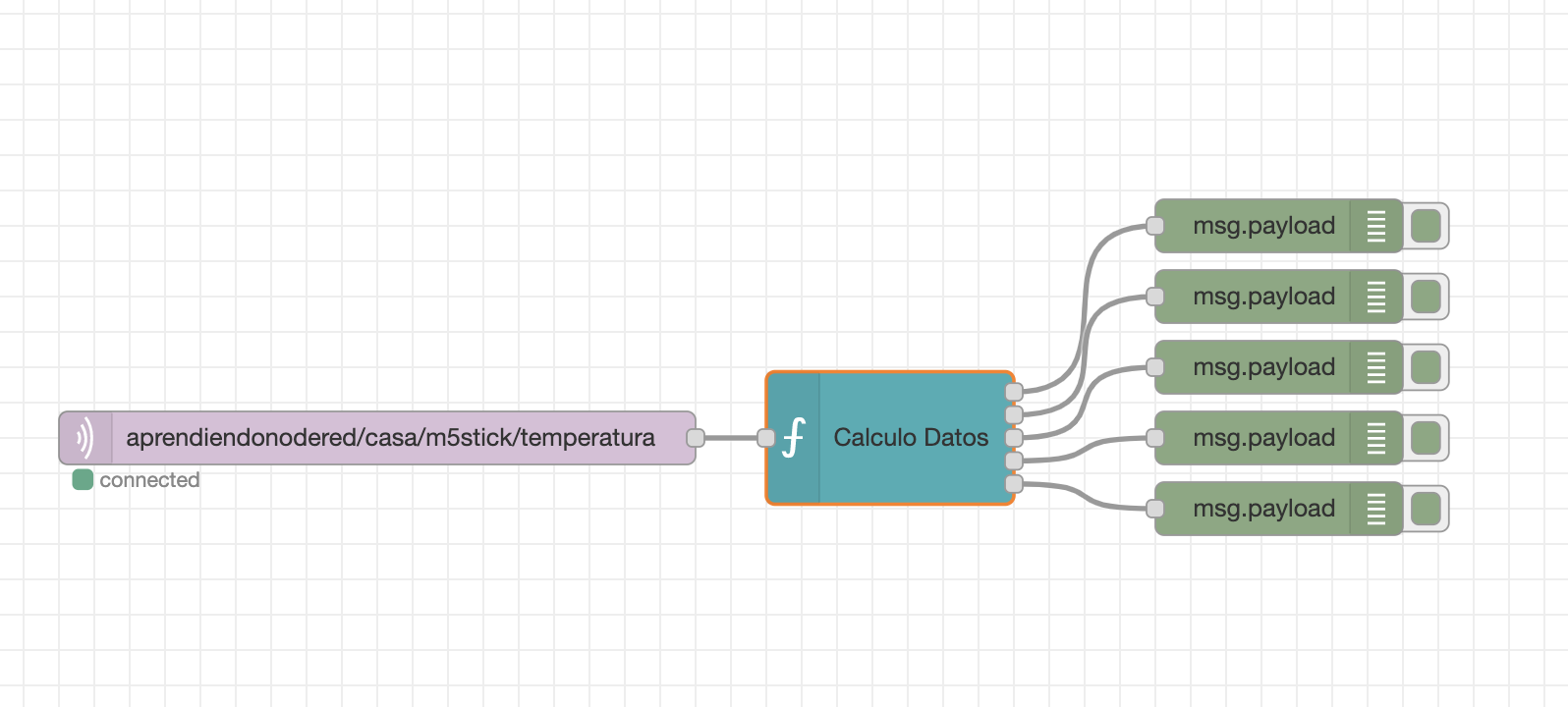
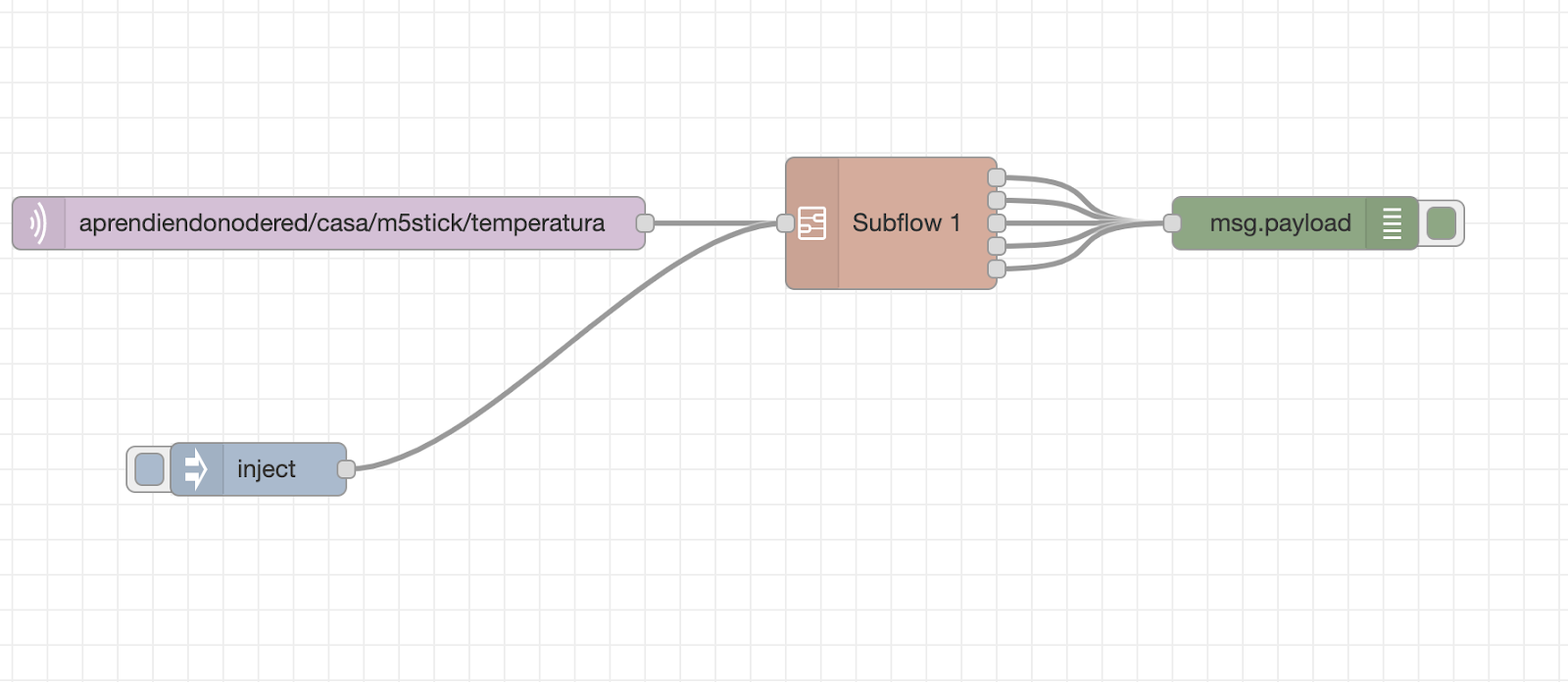
Ejemplo de código de Node-RED:

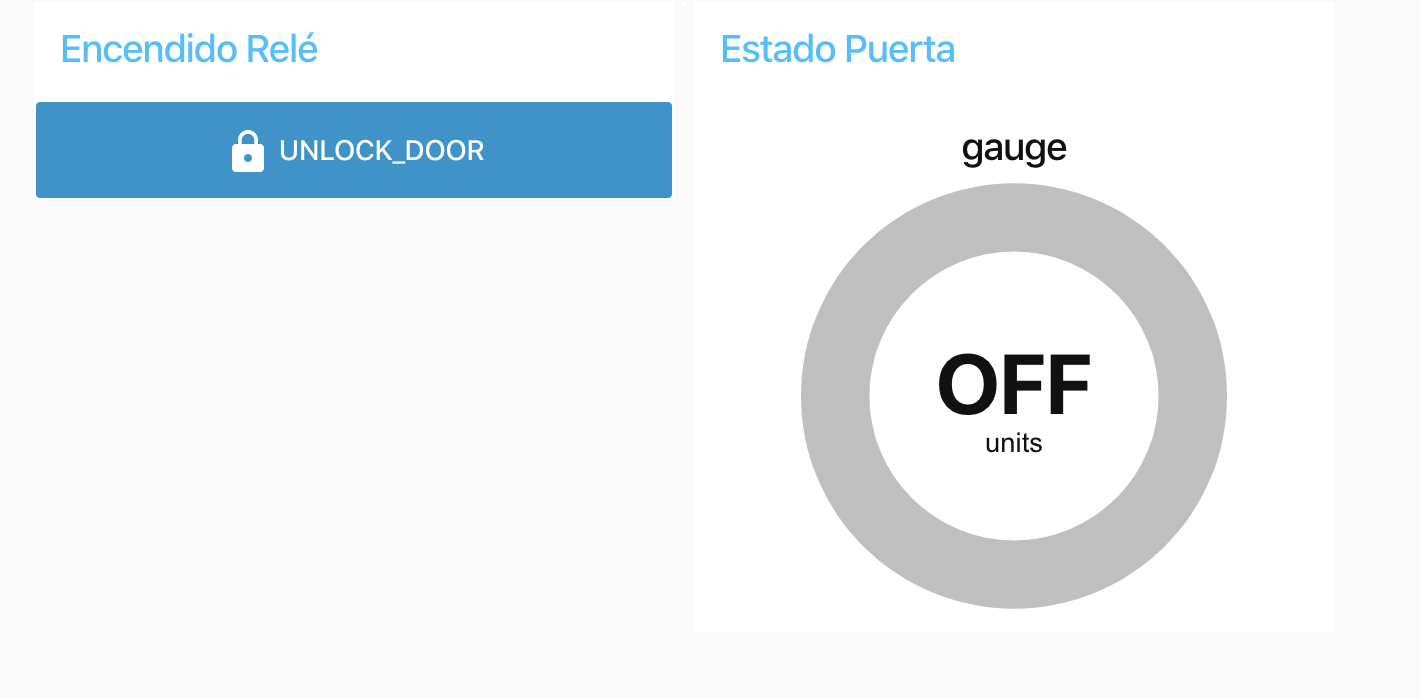
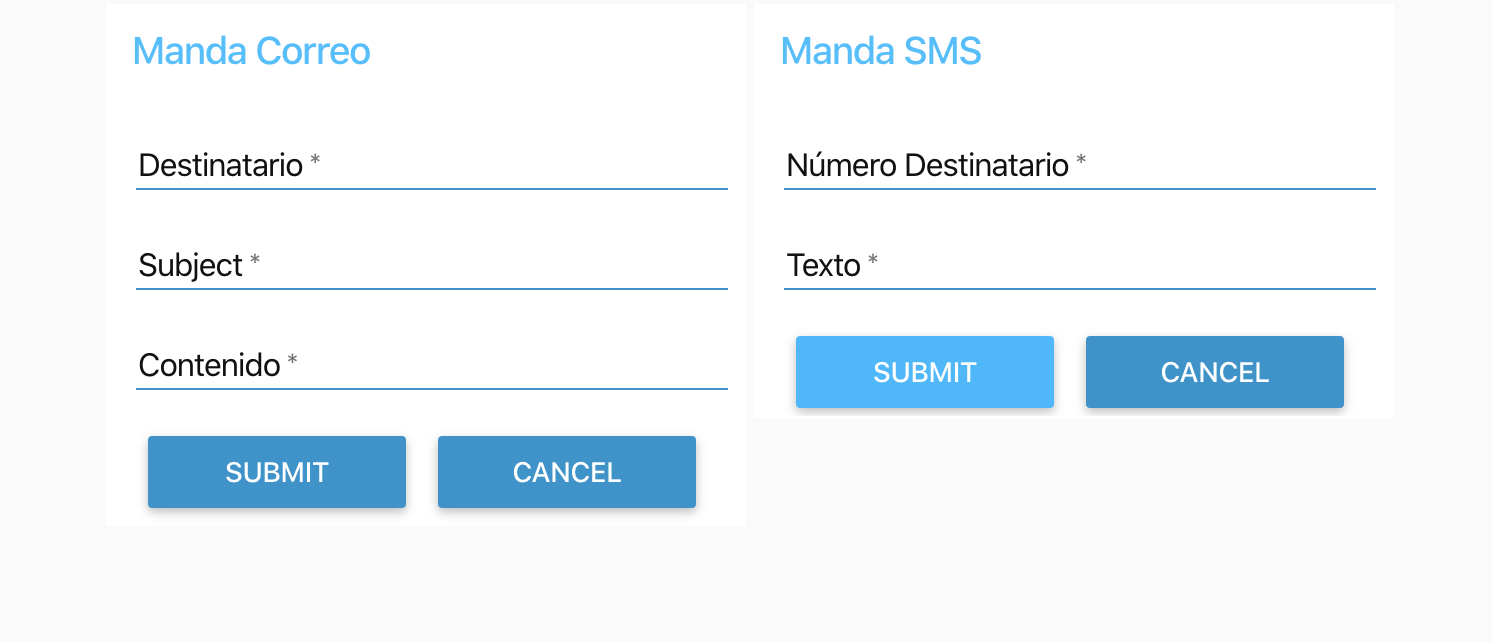
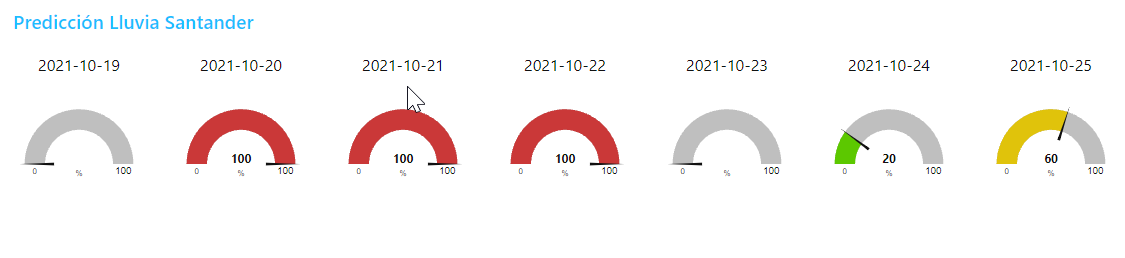
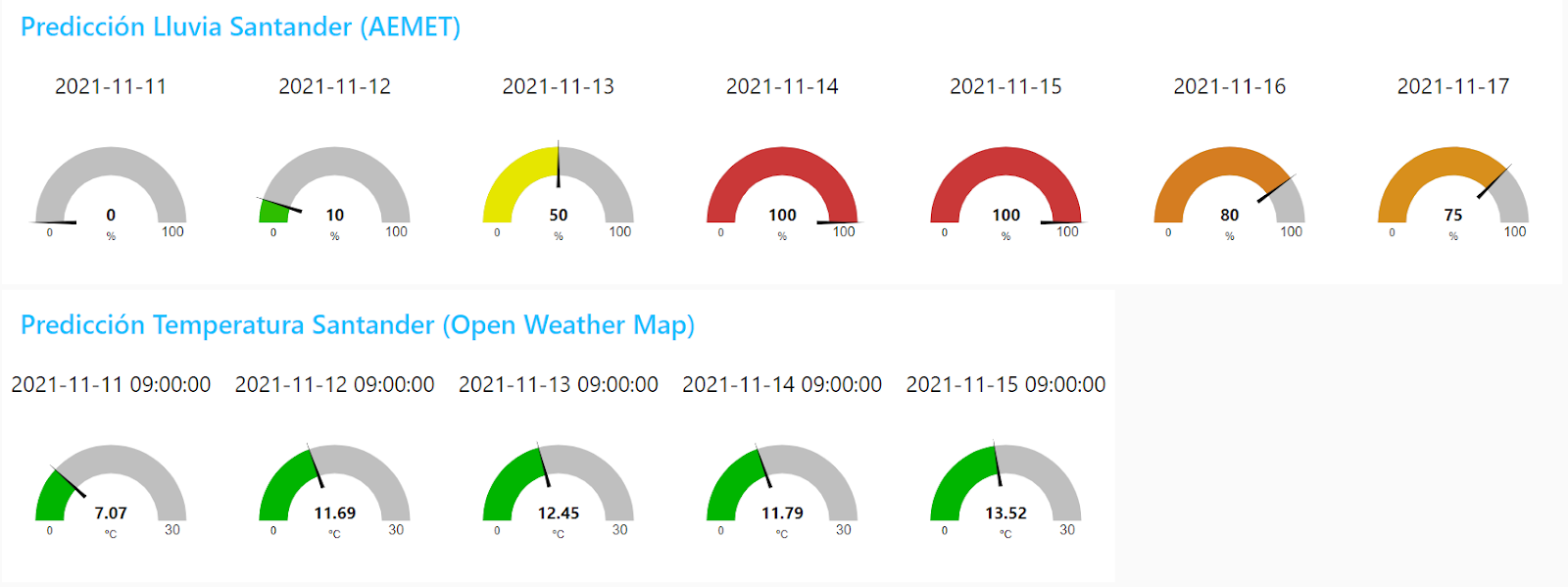
El interfaz diseñado debe ser similar a este:
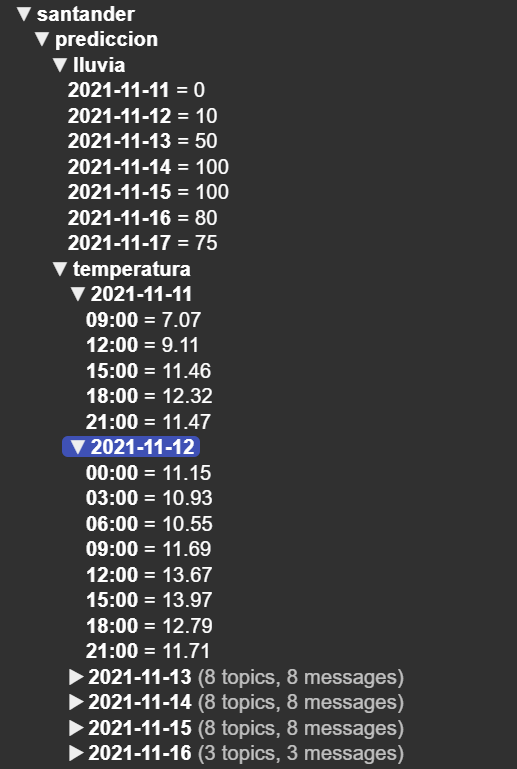
Guardar en la BBDD influxdb https://aprendiendonodered.com:8086 todo lo que se publique en cursomqtt/<ID_DISPOSITIVO>/# poniendo la tag del topic.
















{kind=link}