Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, movimiento, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad o un sensor capacitivo), una tensión eléctrica (como en un termopar), una corriente eléctrica (como en un fototransistor), etc.
Los sensores se pueden clasificar en función de los datos de salida en:
Y dentro de los sensores digitales, estos nos pueden dar una señal digital simple con dos estados como una salida de contacto libre de tensión o una salida en bus digital.
Un ejemplo de sensor analógico sería el ACS714, es un sensor de efecto hall que mide las corrientes eléctricas que pasan a través del chip y devuelve un valor en voltaje proporcional a la corriente que circula por el sensor:

Datasheet: http://www.allegromicro.com/~/Media/Files/Datasheets/ACS714-Datasheet.ashx
Como medir corriente con Arduino y un sensor ACS714: http://playground.arduino.cc/Main/CurrentSensing
Tutorial de uso del sensor ACS714: http://www.instructables.com/id/How-to-Measure-AC-Current-using-Hall-Effect-Sensor/?ALLSTEPS
Características de los sensores
- Rango de medida: dominio en la magnitud medida en el que puede aplicarse el sensor.
- Precisión: es el error de medida máximo esperado.
- Offset o desviación de cero: valor de la variable de salida cuando la variable de entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset.
- Linealidad o correlación lineal.
- Sensibilidad de un sensor: suponiendo que es de entrada a salida y la variación de la magnitud de entrada.
- Resolución: mínima variación de la magnitud de entrada que puede detectarse a la salida.
- Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada.
- Derivas: son otras magnitudes, aparte de la medida como magnitud de entrada, que influyen en la variable de salida. Por ejemplo, pueden ser condiciones ambientales, como la humedad, la temperatura u otras como el envejecimiento (oxidación, desgaste, etc.) del sensor.
- Repetitividad: error esperado al repetir varias veces la misma medida.
Más información: http://es.wikipedia.org/wiki/Sensor#Caracter.C3.ADsticas_de_un_sensor
Tipos de sensores: http://es.wikipedia.org/wiki/Sensor#Tipos_de_sensores
A la hora de elegir un sensor, debemos leer detenidamente las características y elegir uno que sea compatible con nuestro sistema (tensión y voltaje) y que sea sencillo de usar o nos faciliten una librería sencilla y potente.
Catálogo de sensores:
Interesante sensor 4 en 1 temperatura+presión+altitud+luz comunicación por I2C: http://elcajondeardu.blogspot.com.es/2016/04/review-4-sensores-en-1-modulo-medicion.html
Sensores con comunicación por bus.
Un bus (o canal) es un sistema digital que transfiere datos entre los componentes de una dispositivo electrónico o entre varios. Está formado por cables o pistas en un circuito impreso, dispositivos como resistencias y condensadores además de circuitos integrados.
La tendencia en los últimos años hacia el uso de buses seriales como el USB, Firewire para comunicaciones con periféricos, reemplazando los buses paralelos, a pesar de que el bus serial posee una lógica compleja (requiriendo mayor poder de cómputo que el bus paralelo) se produce a cambio de velocidades y eficacias mayores.
Arduino puede comunicarse con los buses serie I2C y SPI sin necesidad de HW adicional
Bus RS485:

Más información en: http://es.wikipedia.org/wiki/Bus_(inform%C3%A1tica)
Existen muchos tipos de buses de comunicaciones, algunos de ellos los implementa arduino mediante controladores HW integrados en la MCU (I2C) o mediante una librería (one wire) y en otros casos es necesario un hardware adicional para adaptar la señal con un transceiver y manejar el protocolo con un controlador, por ejemplo can bus o modbus.
Los sensores DHT11 o DHT22 que vimos anteriormente, son unos pequeños dispositivos que nos permiten medir la temperatura y la humedad. A diferencia de otros sensores, éstos los tendremos que conectar a pines digitales, ya que la señal de salida es digital a un bus punto a punto. Llevan un pequeño microcontrolador interno para hacer el tratamiento de señal. Estos sensores han sido calibrados en laboratorios, presentan una gran fiabilidad.
Ambos sensores funcionan con ciclos de operación de duración determinada. En determinados casos de aplicaciones los tiempos de lectura de los sensores puede ser determinante a la hora de elegirlo.
| Parámetro |
DHT11 |
DHT22 |
| Alimentación |
3Vdc ≤ Vcc ≤ 5Vdc |
3.3Vdc ≤ Vcc ≤ 6Vdc |
| Señal de Salida |
Digital |
Digital |
| Rango de medida Temperatura |
De 0 a 50 °C |
De -40°C a 80 °C |
| Precisión Temperatura |
±2 °C |
<±0.5 °C |
| Resolución Temperatura |
0.1°C |
0.1°C |
| Rango de medida Humedad |
De 20% a 90% RH |
De 0 a 100% RH |
| Precisión Humedad |
4% RH |
2% RH |
| Resolución Humedad |
1%RH |
0.1%RH |
| Tiempo de sensado |
1s |
2s |
| Tamaño |
12 x 15.5 x 5.5mm |
14 x 18 x 5.5mm |
Más información sobre la sonda DHT22: http://www.seeedstudio.com/wiki/Grove_-_Temperature_and_Humidity_Sensor_Pro
Datasheet de sondas DHT22:
Este esquema explica como funciona este sensor y el protocolo de comunicación. La librería implementa el protocolo y facilita el uso de la sonda con Arduino.

Veamos cómo para un mismo sensor tenemos diferentes librerías con funciones y uso diferente en cada una de ellas. Cada uno de los distribuidores de estas sondas ha creado su propia librería.
Otra sonda de temperatura es la DS18B20 pero que usa un bus de comunicación multipunto one wire, lo que nos permite leer muchas sondas con una sola i/o digital.
Sonda: http://www.seeedstudio.com/depot/One-Wire-Temperature-Sensor-p-1235.html
Datasheet sensor: http://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
Librería: http://playground.arduino.cc/Learning/OneWire
Última version de la librería: http://www.pjrc.com/teensy/td_libs_OneWire.html
Protocolo one-wire:

Otros sensores
Sensor ultrasonico de distancia: http://hackarobot.com/how-to-use-ultrasonic-distance-sensor-with-arduino/
Sensor de presion barometrica y altura (I2C): https://www.adafruit.com/products/1603
Sensor laser distancia: http://tienda.bricogeek.com/sensores-distancia/792-escaner-laser-360-grados-rplidar.html
Reed Switch Interruptor de láminas. es un interruptor eléctrico activado por un campo magnético. Cuando los contactos están normalmente abiertos se cierran en la presencia de un campo magnético, cuando están normalmente cerrados se abren en presencia de un campo magnético.
Ejemplos de uso con Arduino:
Comprar un reed Switch: https://www.sparkfun.com/products/8642
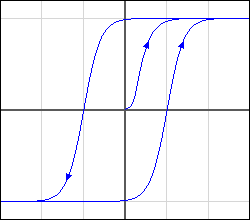
Sensores magneto-resistivos
Los sensores magneto-resistivos (MRS) detectan el movimiento de objetos ferromagnéticos. Están disponibles con o sin sistema de reconocimiento del sentido de giro. Estos sensores se emplean como contador de revoluciones, para la detección de ruedas dentadas y para indicador de averías.
El campo de aplicación de estos sensores abarca: maquinaria de construcción, vehículos sobre carriles, grandes equipos diesel y turbinas.
Más información: http://www.automatica-elec.es/Pulso/Pu_PDF/Pu_Magneto-resistivos_tec.pdf
Magnetoresistencia: https://es.wikipedia.org/wiki/Magnetorresistencia
Ejemplos comerciales: http://sensing.honeywell.es/products/magnetic-position-sensors?Ne=2308&N=3094