Motor DC Básico
Mover un motor DC variando la velocidad y sentido mediante un potenciómetro.
Basado en http://diymakers.es/control-velocidad-y-sentido-de-motor-dc/

Esquema de conexión.


Señales mandadas desde Arduino:

Ver las señales reales con un osciloscopio en los pines 9 y 10 y en la alimentación del motor.
Motor DC Avanzado
Mover un motor DC de 9V usando un integrado L293D (Quadruple Half-H driver). Para controlar la velocidad del motor se usará un potenciómetro conectado al pin A0. Además se usarán dos botones, uno conectado al pin digital 4 para controlar el sentido de giro del motor y otro conectado al pin digital 5 que controlará el encendido y apagado del motor. Con cada pulsación encendemos y apagamos el motor o usamos una dirección de giro u otra con el otro botón.
NOTA: en este caso para controlar la velocidad del motor se usa el pin enable del L293D en lugar de los dos pines de control y envía una señal PWM proporcional al valor leído del potenciómetro.
Datasheet: https://www.arduino.cc/documents/datasheets/H-bridge_motor_driver.PDF

Montaje:

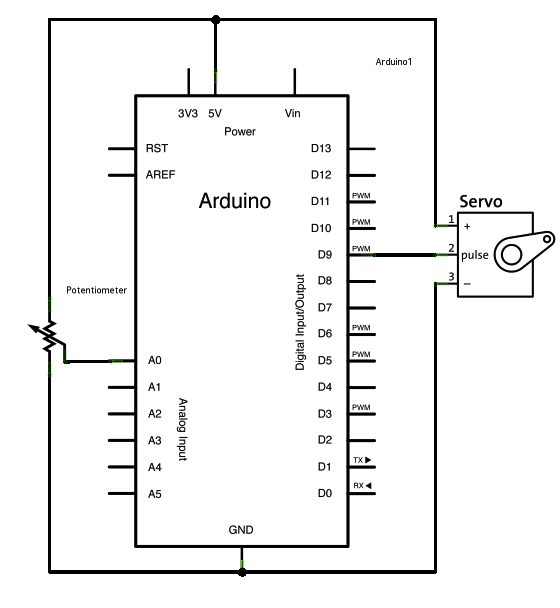
Mover Servo
Controlar la posición de un servo con un potenciómetro.
Esquema de conexión:

Esquemático:
Tutorial: http://arduino.cc/en/Tutorial/Knob
Solución: https://github.com/jecrespo/aprendiendoarduino-Curso_Arduino_2017/tree/master/Ejercicio27-Servo
Barrido con Servo
Programar un barrido continuo del 0 a 180º en un servo. Activar y desactivar el barrido con una pulsación de un botón. p.e. activación de un limpiaparabrisas. Hacer tres velocidades de barrido, cada pulsación sube de velocidad y la cuarta lo para.

Tutorial: http://arduino.cc/en/Tutorial/Sweep
Servo Serial
Controlar la posición del servo como en el ejercicio “Mover servo” pero en lugar de hacerlo con un potenciómetro, hacerlo desde el puerto serie mandando el ángulo al que debe ir. Desde el monitor serie pregunta la posición y se manda un valor entre 0 y 180.
De la misma forma que controlamos desde el puerto serie, se puede extender a controlar el servo desde una aplicación en un ordenador o desde una página web.
Esquema de conexión:
Tutorials(2f)Servo(20)Controller/arduino_servo.png?zoom=2)
Mover un Servo con un Acelerómetro
Una IMU (Inertial Measurement Unit) es un dispositivo capaz de medir la fuerza (aceleración) y la velocidad. Generalmente consta de un Acelerómetro y un Giroscopio. Por lo tanto una IMU no mide ángulos, por lo menos no directamente, requiere algunos cálculos.
Un dispositivo I2C muy interesante es el MPU-6050 que nos sirve para probar e introducirnos en el mundo de los giroscopios y acelerómetros.
- https://www.invensense.com/products/motion-tracking/6-axis/mpu-6050/
- Datasheet: https://www.cdiweb.com/datasheets/invensense/MPU-6050_DataSheet_V3%204.pdf
Para esta práctica vamos a utilizar una Breakout board bastante típica llamada GY-521, que incluye la IMU MPU-6050 y un regulador de tensión, con lo que podemos alimentar a tanto 3.3V como a 5V.
El siguiente diagrama muestra la orientación de los ejes de sensibilidad y la polaridad de rotación.

El acelerómetro mide la aceleración. La aceleración puede expresarse en 3 ejes: X, Y y Z, las tres dimensiones del espacio. Por ejemplo, si mueves la IMU hacia arriba, el eje Z marcará un cierto valor. Si es hacia delante, marcará el eje X, etc. La gravedad de la Tierra tiene una aceleración de aprox. 9.8 m/s², perpendicular al suelo como es lógico. Así pues, la IMU también detecta la aceleración de la gravedad terrestre. Gracias a la gravedad terrestre se pueden usar las lecturas del acelerómetro para saber cuál es el ángulo de inclinación respecto al eje X o eje Y.
Supongamos que la IMU esté perfectamente alineada con el suelo. Entonces, como puedes ver en la imagen, el eje Z marcará 9.8, y los otros dos ejes marcarán 0. Ahora supongamos que giramos la IMU 90 grados. Ahora es el eje X el que está perpendicular al suelo, por lo tanto marcará la aceleración de la gravedad.

Si sabemos que la gravedad es 9.8 m/s², y sabemos qué medida dan los tres ejes del acelerómetro, por trigonometría es posible calcular el ángulo de inclinación de la IMU. Una buena fórmula para calcular el ángulo es:


Dado que el ángulo se calcula a partir de la gravedad, no es posible calcular el ángulo Z (giro sobre si mismo) con esta fórmula ni con ninguna otra. Para hacerlo se necesita otro componente: el magnetómetro, que es un tipo de brújula digital. El MPU-6050 no lleva, y por tanto nunca podrá calcular con precisión el ángulo Z. Sin embargo, para la gran mayoría de aplicaciones sólo se necesitan los ejes X e Y.
Esquema de conexión IMU:

Esquema conexión servo:
Tutorials(2f)Servo(20)Controller/arduino_servo.png)
Mover el servo en función del ángulo en el eje x obtenido de la IMU.
Solución: https://github.com/jecrespo/aprendiendoarduino-Curso_Arduino_2017/tree/master/Ejercicio30-Servo_IMU
Motor Paso a Paso
Mover un motor paso a paso modelo 28BYJ-48 con su adaptador basado en el chip ULN2003A.

El 28BYJ-48 tiene un paso de 5.625 grados (64 pasos por vuelta). El reductor interno tiene una relación de 1/64. Combinados, la precisión total es de 4096 pasos por vuelta, equivalente a un paso de 0.088º, que es una precisión muy elevada.
Es un motor paso a paso unipolar con las siguientes características:
- Tensión nominal de entre 5V y 12 V.
- 4 Fases.
- Resistencia 50 Ω.
- Par motor de 34 Newton / metro más o menos 0,34 Kg por cm.
- Consumo de unos 55 mA.
- 64 pasos por vuelta (con medios pasos).
- Reductora de 1 / 64.
Datasheet: http://robocraft.ru/files/datasheet/28BYJ-48.pdf
Vamos a usar la secuencia de medios pasos. Con esta secuencia conseguimos una precisión de la mitad del paso. El par desarrollado varía ya que en algunos pasos activamos dos bobinas y en otras solo una, pero a la vez el giro se encuentra más “guiado”, por lo que en general ambos efectos se compensan y el funcionamiento es bueno, salvo en aplicaciones donde estemos muy al límite del par máximo.
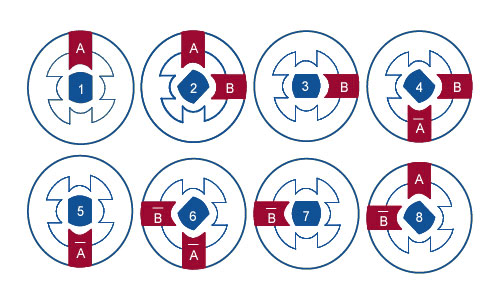
Expresando la secuencia en forma de tabla resulta:
| Medio-paso | A | B | A’ | B’ |
| 1 | ON | OFF | OFF | OFF |
| 2 | ON | ON | OFF | OFF |
| 3 | OFF | ON | OFF | OFF |
| 4 | OFF | ON | ON | OFF |
| 5 | OFF | OFF | ON | OFF |
| 6 | OFF | OFF | ON | ON |
| 7 | OFF | OFF | OFF | ON |
| 8 | ON | OFF | OFF | ON |
Modo de medio paso: secuencia de señal de control 8 pasos (recomendada) 5.625 grados por paso / 64 pasos por una revolución del eje del motor interno. Relación de transmisión 64. Total 64 x 64 = 4096 pasos.
Modo de paso completo: secuencia de señal de control de 4 pasos 11.25 grados por paso / 32 pasos por una revolución de la interna eje de motor. Relación de transmisión 64. Total 64 x 32 = 2048 pasos.
Esquema de conexión:

Conexiones de la placa de driver:

Ejercicio basado en http://www.prometec.net/motor-28byj-48/
Otros tutoriales:
- https://www.luisllamas.es/motor-paso-paso-28byj-48-arduino-driver-uln2003/
- https://programarfacil.com/blog/motor-paso-a-paso/
- http://www.web-robotica.com/arduino/motor-de-pasos-28byj-48-con-driver-uln2003-y-arduino-uno
Solución: https://github.com/jecrespo/aprendiendoarduino-Curso_Arduino_2017/tree/master/Ejercicio31-Stepper
La otra manera de programar un motor 28BYJ-48 es utilizar la librería Steper que viene incluida con el entorno de desarrollo oficial de Arduino. Esta librería nos facilita el uso de este tipo de motores y viene adaptada para motores bipolares. En este caso la librería stepper usa el modo de paso completo en lugar del medio paso. En este caso el nº de pasos por vuelta es 2048.
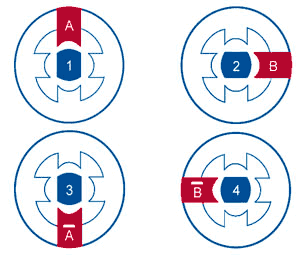
Llevando esta secuencia de encendido a una tabla, que posteriormente usaremos para el código, la secuencia quedaría de la siguiente forma:
| Paso | A | B | A’ | B’ |
| 1 | ON | OFF | OFF | OFF |
| 2 | OFF | ON | OFF | OFF |
| 3 | OFF | OFF | ON | OFF |
| 4 | OFF | OFF | OFF | ON |
Código para mover el motor:
#include <Stepper.h>
#define STEPS 2048
Stepper stepper(STEPS, 8, 9, 10, 11);
void setup() {
stepper.setSpeed(10);
}
void loop() {
stepper.step(2048);
}

Pingback: Saber Más… | Aprendiendo Arduino
Pingback: Saber Más Iniciación Arduino 2017 | Aprendiendo Arduino
Pingback: Saber Más Iniciación Arduino 2019 | Aprendiendo Arduino