La estructura básica de un sketch de Arduino es bastante simple y se compone de al menos dos partes. Estas dos partes son obligatorios y encierran bloques que contienen declaraciones, estamentos o instrucciones.
- setup() – http://arduino.cc/en/Reference/Setup
- loop() – http://arduino.cc/en/Reference/Loop

setup() es la parte encargada de recoger la configuración y loop() es la que contiene el programa que se ejecuta cíclicamente (de ahí el término loop –bucle-). Ambas funciones son necesarias para que el programa trabaje.
La función de configuración (setup) debe contener la inicialización de los elementos y esta función sólo se ejecuta una vez justo después de hacer el reset y no se vuelve a ejecutar hasta que no haya otro reset. Es la primera función a ejecutar en el programa y se utiliza para configurar, inicializar variables, comenzar a usar librerías, etc…
La función bucle (loop) contiene el código que se ejecutará continuamente (lectura de entradas, activación de salidas, etc). Esta función es el núcleo de todos los programas de Arduino y se usa para el control activo de la placa. La función loop se ejecuta justo después de setup.
La estructura del sketch está definida en el siguiente enlace: http://arduino.cc/en/Tutorial/Sketch
Los componentes principales de un sketch de Arduino son:
- Variables, son un espacio en memoria donde se almacenan datos y estos datos pueden variar.
- Funciones, son un trozo de código que puede ser usado/llamado desde cualquier parte del sketch. A la función se le puede llamar directamente o pasarle unos parámetros, en función de cómo esté definida.
- setup() y loop(), son dos funciones especiales que es obligatorio declarar en cualquier sketch.
- Comentarios, fundamentales para documentar el proyecto
Se puede resumir un sketch de Arduino en los siguientes diagramas de flujo:

Para más información de como programar Arduino ver: https://aprendiendoarduino.wordpress.com/2016/10/16/programacion-arduino-2/
Cargar un Programa en Arduino
Una vez tenemos el programa hay que compilarlo y mandarlo a Arduino para que se ejecute de forma infinita.
Pasos a seguir:
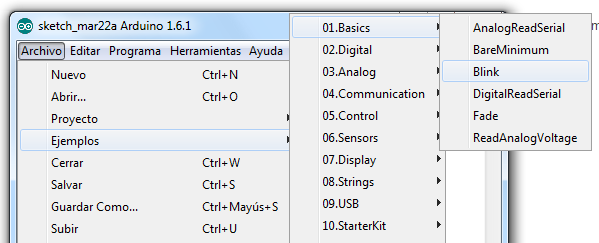
- Abrir la aplicación Arduino
- Abrir el sketch que queremos cargar
- Leer el programar y entender lo que está haciendo
- Seleccionar la placa y el puerto adecuado

- Cargar el programa pulsando el botón “subir”. El programa se compila y luego se verá parpadeando los leds Tx y Rx de Arduino, indicando que se está cargando el fichero binario (.hex) en la flash del Arduino. Cuando aparezca el mensaje “subido” habremos acabado.
- Un momento después el programa se está ejecutando el Arduino
Cuando cargamos un programa en Arduino, estamos usando el bootloader de Arduino, que es un pequeño programa cargado en el microcontrolador que permite subir el código sin usar hardware adicional. El bootloader está activo unos segundos cuando se resetea la placa, después comienza el programa que tenga cargado el Arduino en su memoria Flash. El led integrado en la placa (pin 13) parpadea cuando el bootloader se ejecuta.
Entradas y Salidas Digitales en Arduino
En arduino los pines digitales se describen y tienen la propiedades siguientes: http://arduino.cc/en/Tutorial/DigitalPins
En arduino para tratar las entradas y salidas digitales usamos las siguientes funciones:
- pinMode() – configura en el pin especificado si se va a comportar como una entrada o una salida. http://arduino.cc/en/Reference/PinMode
- digitalWrite() – Escribe un valor HIGH o LOW en el pin digital especificado. Si el pin está configurado como OUTPUT pone el voltaje correspondiente en el pin seleccionado. Si el pin está configurado como INPUT habilita o deshabilita la resistencia interna de pull up del correspondiente pin. http://arduino.cc/en/Reference/DigitalWrite
- digitalRead() – lee el valor del pin correspondiente como HIGH o LOW. http://arduino.cc/en/Reference/DigitalRead
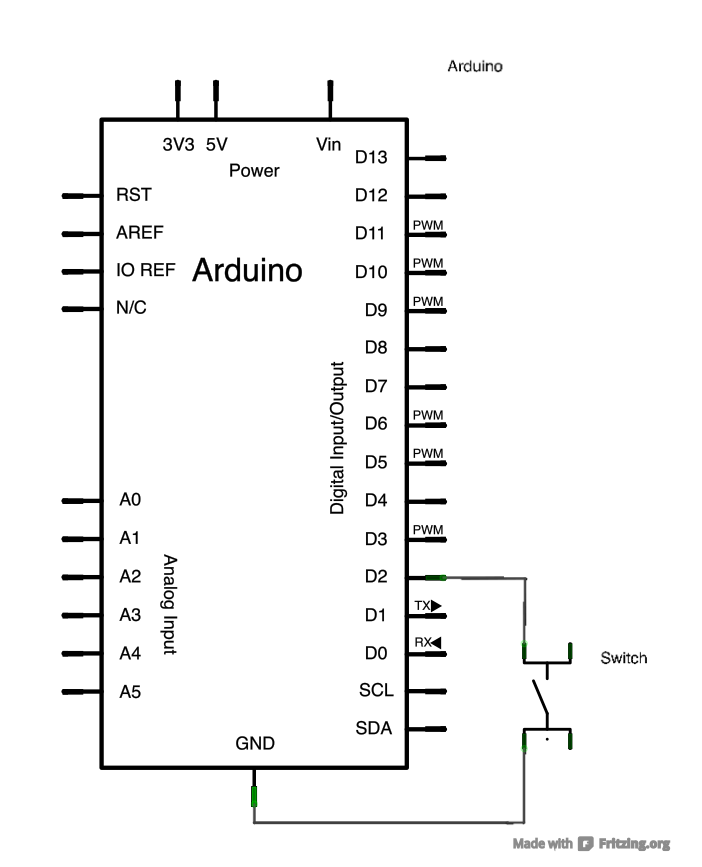
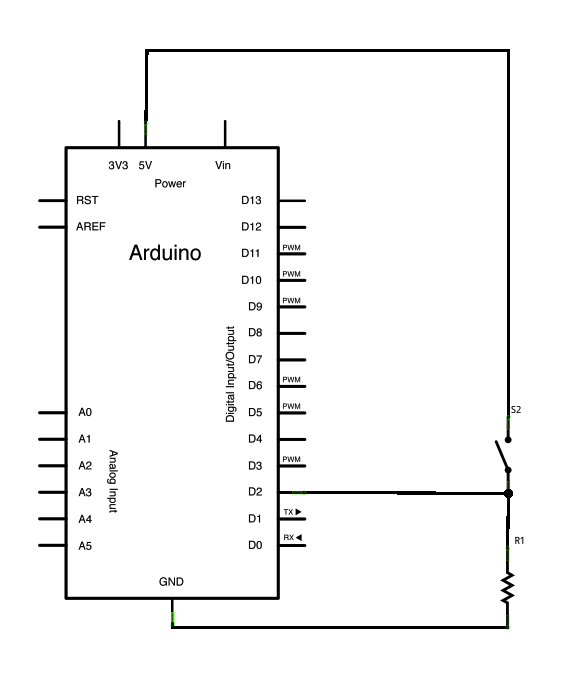
En la imagen siguiente se muestra el estado por defecto de una I/O digital en un microcontrolador de Arduino. Se ha simplificado con interruptores la compleja electrónica que hay dentro. Por defecto los digital I/O pins están configurados como inputs en un estado de alta impedancia (equivalente a una resistencia de 100 Mohms en frente del pin), es decir, SW3 a ON y no hace falta llamar a la función pinMode() aunque es recomendable para aclarar el código.
- PinMode(x, INPUT) –> SW3 = ON (resto a OFF). Los valores leídos serán aleatorios si el pin de Arduino está al aire. El pin está en un estado de alta impedancia (resistencia de 100 Mohms).
- PinMode(x,INPUT_PULLUP) –> SW3 = ON & SW4 = ON (resto a OFF). Los valores leídos sin nada conectado al pin es HIGH. La Resistencia R1 tiene un valor dependiendo del microcontrolador, pero tiene un valor entre 20kOhm y 150kOhm.
- PinMode(x, OUTPUT) & digitalWrite(x,HIGH) –> SW2 = ON & SW1 = +5V (resto a OFF). Estado de baja impedancia, no hay resistencia interna y es necesario poner una resistencia adecuada a la salida el pin para no superar los 40mA (source) máximos admitidos
- PinMode(x, OUTPUT) & digitalWrite(x,LOW) –> SW2 = ON & SW1 = GND (resto a OFF). Estado de baja impedancia, no hay resistencia interna y es necesario poner una adecuada para no superar los 40mA (sink) máximos admitidos

Entradas y Salidas Analógicas en Arduino
Los microcontroladores de Arduino contienen en la placa un conversor analógico a digital de 6 canales. El conversor tiene una resolución de 10 bits, devolviendo enteros entre 0 y 1023. Los pines analógicos de Arduino también tienen todas las funcionalidades de los pines digitales. Por lo tanto, si necesitamos más pines digitales podemos usar los pines analógicos. La nomenclatura para los pines analógicos es A0, A1, etc…
En arduino los pines analógicos se definen y tienen las propiedades siguientes: http://arduino.cc/en/Tutorial/AnalogInputPins
En arduino para tratar las entradas y salidas digitales usamos las siguientes funciones:
- analogReference() – configura la referencia de voltaje usada para la entrada analógica. http://arduino.cc/en/Reference/AnalogReference
- analogRead() – lee el valor del pin analógico especificado. http://arduino.cc/en/Reference/AnalogRead
- analogWrite() – escribe un valor analógico (onda PWM) al pin especificado. No en todos los pines digitales se puede aplicar PWM. http://arduino.cc/en/Reference/AnalogWrite
Otras funciones interesantes con entradas/salidas analóicas:
- map(value, fromLow, fromHigh, toLow, toHigh) http://arduino.cc/en/Reference/Map
- constrain(x, a, b) http://arduino.cc/en/Reference/Constrain
PWM
Arduino Uno tiene entradas analógicas que gracias a los conversores analógico digital puede entender ese valor el microcontrolador, pero no tiene salidas analógicas puras y para solucionar esto, usa la técnica de PWM.
Las Salidas PWM (Pulse Width Modulation) permiten generar salidas analógicas desde pines digitales. Arduino Uno no posee salidas analógicas puras.
La modulación por ancho de pulsos (también conocida como PWM, siglas en inglés de pulse-width modulation) de una señal o fuente de energía es una técnica en la que se modifica el ciclo de trabajo de una señal periódica (una senoidal o una cuadrada, por ejemplo), ya sea para transmitir información a través de un canal de comunicaciones o para controlar la cantidad de energía que se envía a una carga.
El ciclo de trabajo de una señal periódica es el ancho relativo de su parte positiva en relación con el período. duty cycle = (tiempo que la salida está a uno o HIGH)/ (periodo de la función)


En Arduino la frecuencia de PWM es de 500Hz. Pero es un valor que puede modificarse en caso que lo necesitemos. Definición de PWM en la web de Arduino: http://arduino.cc/en/Tutorial/PWM