Los Arduino y en general los microcontroladores tienen puertos de entrada y salida y de comunicación. En Arduino podemos acceder a esos puertos a través de los pines.
- Pines digitales: http://www.arduino.cc/en/Tutorial/DigitalPins, pueden configurarse como entrada (para leer, sensores) o como salida (para escribir, actuadores)
- Pines analógicos de entrada: https://www.arduino.cc/en/Tutorial/AnalogInputPins, usan un conversor analógico/digital y sirven para leer sensores analógicos como sondas de temperatura.
- Pines analógicos de salida (PWM): https://www.arduino.cc/en/Tutorial/PWM, la mayoría de Arduino no tienen conversor digital/analógico y para tener salidas analógicas se usa la técnica PWM. No todos los pines digitales soportan PWM.
- Puertos de comunicación: USB, serie, I2C y SPI
Otro aspecto importante es la memoria, Arduino tiene tres tipos de memoria:
- SRAM: donde Arduino crea y manipula las variables cuando se ejecuta. Es un recurso limitado y debemos supervisar su uso para evitar agotarlo.
- EEPROM: memoria no volátil para mantener datos después de un reset o apagado. Las EEPROMs tienen un número limitado de lecturas/escrituras, tener en cuenta a la hora de usarla.
- Flash: Memoria de programa. Usualmente desde 1 Kb a 4 Mb (controladores de familias grandes). Donde se guarda el sketch.
Más información en:
- http://arduino.cc/en/Tutorial/Memory
- https://aprendiendoarduino.wordpress.com/2015/03/29/memoria-flash-sram-y-eeprom/
Placa Arduino Uno a fondo:

Especificaciones detalladas de Arduino UNO: http://arduino.cc/en/Main/ArduinoBoardUno
| Microcontroller & USB-to-serial converter | ATmega328P & Atmega16U2 |
| Operating Voltage | 5V |
| Input Voltage (recommended) | 7-12V |
| Input Voltage (limits) | 6-20V |
| Digital I/O Pins | 14 (of which 6 provide PWM output) |
| Analog Input Pins | 6 |
| DC Current per I/O Pin | 40 mA |
| DC Current for 3.3V Pin | 50 mA |
| Flash Memory | 32 KB (ATmega328) of which 0.5 KB used by bootloader |
| SRAM | 2 KB (ATmega328) |
| EEPROM | 1 KB (ATmega328) |
| Clock Speed | 16 MHz |
Veamos todos los componentes del Arduino UNO:

Pin mapping Arduino UNO:
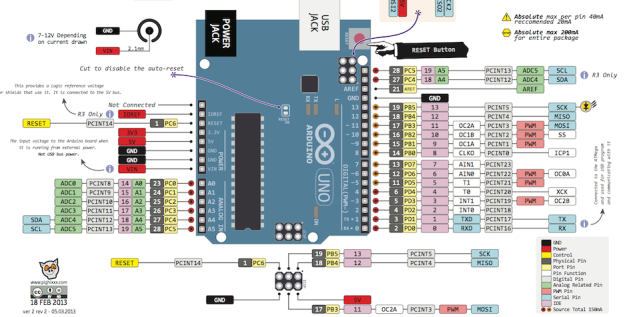
Componentes en la placa:

HW de Arduino a fondo: https://learn.adafruit.com/arduino-tips-tricks-and-techniques/arduino-uno-faq
Componentes:
- No necesita de un cable FTDI para conectarse al MCU, en su lugar uso una MCU ATMEGA16U2 especialmente programado para trabajar como conversor de USB a serie.
- Alimentación: vía USB, batería o adaptador AC/DC a 5V, seleccionado automáticamente. Arduino puede trabajar entre 6 y 20V, pero es recomendado trabajar entre 7 y 12V por las características del regulador de tensión.
- Puerto Serie en los pines 0 y 1.
- Interrupciones externas en los pines 2 y 3.
- Built-in LED en el pin 13.
- Bus TWI o I2C en los pines A4 y A5 etiquetados como SDA y SCL o pines específicos
- El MCU ATmega328P tiene un bootloader precargado que permite cargar en la memoria flash el nuevo programa o sketch sin necesidad de un HW externo.
- Fusible rearmable de intensidad máxima 500mA. Aunque la mayoría de pc’s ya ofrecen protección interna se incorpora un fusible con la intención de proteger tanto la placa Arduino como el bus USB de sobrecargas y cortocircuitos. Si circula una intensidad mayor a 500mA por el bus USB(Intensidad máxima de funcionamiento), el fusible salta rompiendo la conexión de la alimentación.
- Regulador de voltaje LP2985 de 5V a 3.3V que proporciona una corriente de alimentación máxima de 150 mA.
- Regulador de voltaje NCP1117 que proporciona un valor estable de 5V a la placa y soporta por encima de 1 A de corriente. Datasheet: http://www.onsemi.com/pub_link/Collateral/NCP1117-D.PDF
- ATMEGA16U2 => Es el chip encargado de convertir la comunicación del puerto USB a serie.
- Condensadores de 47µF de capacidad
- Diodo M7 en la entrada de alimentación de la placa. Con este diodo conseguimos establecer el sentido de circulación de la intensidad, de esta forma si se produce una contracorriente debido a la apertura de un relé u otros mecanismos eléctricos, el diodo bloquea dicha corriente impidiendo que afecte a la fuente de alimentación.
- DFU-ICSP. Puerto ICSP para el microcontrolador ATMEGA16U2, como en el caso del ATMEGA328P-PU se emplea para comunicarnos con el microcontrolador por el serial, para reflashearlo con el bootloader, hacer algunas modificaciones, ponerlo en modo DFU, etc..
- JP2. Pines libres del ATMEGA16U2, dos entradas y dos salidas para futuras ampliaciones.
- Encapsulados de resistencias.
- RESET-EN: Significa Reset enabled o reset habilitado. Está habilitado el auto-reset, para deshabilitar por cualquier tipo de seguridad (por ejemplo un proyecto que tenemos funcionando y no queremos que nadie lo reinicie al conectar un USB y detecte un stream de datos) debemos desoldar los pads RESET-EN y limpiarlos de forma que estén aislados el uno del otro.
- Cristal oscilador de 16MHz necesario para el funcionamiento del reloj del microcontrolador ATMEGA16U2.
- Resonador cerámico de 16 Mhz para el microcontrolador ATMEGA328P-PU. Los resonadores cerámicos son menos precisos que los cristales osciladores, pero para el caso hace perfectamente la función y ahorramos bastante espacio en la placa. Se trata del pequeño, porque el cristal grande es para el 16U2
Diferencias entre las diversas versiones de HW de los Arduino: http://startingelectronics.com/articles/arduino/uno-r3-r2-differences/
Más información:
- http://tallerarduino.com/2013/06/28/arduino-pinout-y-conexiones-basicas/
- https://learn.adafruit.com/arduino-tips-tricks-and-techniques/arduino-uno-faq
MCU ATmega16u2 en Arduino
Si nos fijamos en el pequeño integrado que hay en la placa de Arduino UNO junto al conector USB, se trata de un ATmega16u2 cuya misión es dar el interfaz USB al Arduino UNO y comunicar los datos con el ATmega328p mediante el puerto serie. Se podría usar como microcontrolador completamente funcional y no solo un conversor de USB a Serial con ciertas modificaciones. Podríamos usar ambas MCUs en la misma placa, pudiendo descargar trabajo de la MCU principal en la secundaria.
Para ello usa el hoodloader2 en el Atmega16U2 o Atmega8U2 dependiendo de la versión de Arduino Uno que tengamos y comunicamos ambas MCUs por HW serial

Como usar el segundo MCU del Arduino UNO: http://www.freetronics.com/blogs/news/16053025-using-both-microcontrollers-on-your-arduino-uno-compatible-board#.VIg48zGG9B9
Web del proyecto: http://nicohood.wordpress.com/2014/11/30/hoodloader2-ready-to-use-usb-hid-for-arduino-unomega/
HoodLoader2: https://github.com/NicoHood/HoodLoader2
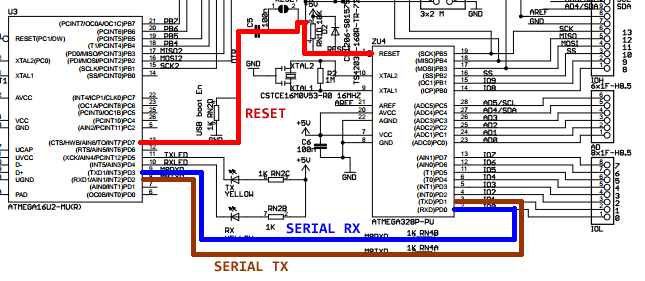
Esquemático Arduino UNO
En este pdf podemos ver el esquema de un Arduino UNO, muy importante conocerlo para evitar hacer maniobras que lo dañen: http://arduino.cc/en/uploads/Main/Arduino_Uno_Rev3-schematic.pdf
Los dos microcontroladores:

Partes del esquemático:

Conexión de los puertos serie de loas os MCUs de un Arduino UNO
También es importante conocer cómo están distribuidos los pines del MCU en Arduino:
- Pin Mapping: http://arduino.cc/en/Hacking/PinMapping168
- http://www.umsats.ca/wp-content/uploads/2013/02/Arduino_uno_Pinout.pdf
- http://pighixxx.com/atmega328v3_0.pdf
- http://pighixxx.com/unov3pdf.pdf
- Y más pinout de diversas placas, MCUs, etc… http://www.pighixxx.com/test/pinoutspg/
Para saber todo sobre el HW de Arduino ver este tutorial donde desglosa todo el HW de Arduino para construir un Arduino UNO desde cero y crear tu propio clon: https://rheingoldheavy.com/category/education/fundamentals/arduino-from-scratch-series/
Diseño PCB Arduino
La placa de Arduino:

Están disponible los esquemas y diseño en formato Eagle para Arduino UNO en http://arduino.cc/en/uploads/Main/arduino_Uno_Rev3-02-TH.zip. Por supuesto para el resto de Arduinos también disponemos de sus diseños de PCB.
Para ver los esquemas podemos usar Eagle, se trata de un programa de diseño de diagramas y PCBs con autoenrutador:
- http://www.cadsoftusa.com/eagle-pcb-design-software/product-overview/
- Versión Freeware http://www.cadsoftusa.com/download-eagle/freeware/
La versión freeware de Eagle es perfecta para diseños pequeños y sencillos, se trata de una licencia para uso no comercial y gratuita para todos. La versión freeware tienen todas las funcionalidades de la versión de pago pero tiene ciertas limitaciones:
- El área de la placa está limitada a 100 x 80 mm
- Solo pueden usarse dos capas (Top y Bottom)
- El editor del esquemático solo puede tener dos hojas.
- Soporte solo disponible vía email o foro
- Su uso está limitado a aplicaciones no comerciales o para evaluación
- Se puede cargar, ver e imprimir diseños que superen esos límites.
Una opción opensource para diseño de PCB es kicad: http://kicad-pcb.org/
Microcontroladores Arduino
Un microcontrolador es un integrado capaz de ser programado desde un ordenador y seguir la secuencia programada.
Como vimos anteriormente, Arduino es una plataforma para programar de forma sencilla algunos microcontroladores de la familia AVR de Atmel: http://es.wikipedia.org/wiki/AVR y también microcontroladores Atmel ARM Cortex-M0+, Intel http://www.intel.com/content/dam/support/us/en/documents/boardsandkits/curie/intel-curie-module-datasheet.pdf y con la aparición de arduino.org también microcontroladores de ST microelectronics.
Pero también Arduino y su entorno de programación se está convirtiendo en un estándar de facto para la programación de cualquier tipo de placas de desarrollo y prototipado, es decir, de otro tipo de microcontroladores no incluidos en los productos de Arduino.
Puesto que Arduino es una plataforma open source disponemos de toda la documentación de los microcontroladores usados.
Por ejemplo, el microcontroaldor de Arduino UNO es el ATmega 328p y toda la documentación la tenemos en http://www.atmel.com/devices/atmega328p.aspx. El data sheet completo es un documento de 444 páginas que podemos ver en http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf. Cuando necesitemos más información o cómo funciona este microcontrolador debemos ir a este documento.
Como muestra de la documentación que tenemos disponible:
- Página 34 tenemos el detalle de cómo se distribuye la memoria en el ATmega328p
- Página 97 tiene en detalle los puertos digitales I/O y página 100 donde da el código para definir un pines a high y low y también como input pullup.
- Página 436 tenemos los 3 encapsulados posibles para este microcontrolador
- Página 316 nos muestra que este microcontrolador tiene un sensor de temperatura integrado y que es posible habilitarlo para leer su temperatura, al igual que los procesadores de nuestros ordenadores.
- Página 378 se pueden ver los consumos de Arduino y la dependencia entre la frecuencia máxima de reloj y el Vcc.
- Página 428 hay un resumen de todos los registros del microcontrolador y su dirección de memoria.
Cuando el microcontrolador ejecuta una instrucción que definimos en el sketch, internamente hace muchas operaciones y cada una de esas operaciones se ejecuta en un ciclo de reloj. Para el ATmega 328p que tiene una frecuencia de 16 MHz, es decir, cada ciclo tarda 0,0000000625 segundos = 0,0625 microsegundos = 62,5 nanosegundos

Así se ejecutaría una instrucción, en cada ciclo de reloj se ejecuta cada subinstrucción.
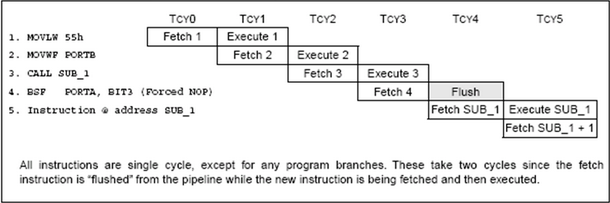
La importancia de conocer el ciclo de ejecución de instrucciones en un micro controlador estriba en que en ocasiones es necesario calcular de forma precisa el tiempo de ejecución de los bucles para actuar en tiempo real.
Cálculos de la velocidad de las operaciones en Arduino: http://forum.arduino.cc/index.php?topic=200585.0


El método para calcular estas tablas está en http://forum.arduino.cc/index.php?topic=200585.0
Diferencia entre los microcontroladores de 8 bits, 16, y 32 bits, es tamaño de palabra que manejan e influye en los registros y direccionamiento de memoria: http://es.wikipedia.org/wiki/Palabra_(inform%C3%A1tica)
Este mismo análisis hecho con el ATmega328P, podemos hacerlo con otros microcontroladores:
- ATmega2560 del Mega: http://www.atmel.com/devices/atmega2560.aspx
- ATmega32U4 del Leonardo: http://www.atmel.com/devices/atmega32u4.aspx
- ATSAMD21G18 del Zero: http://www.atmel.com/devices/ATSAMD21G18.aspx
- ATSAMW25 del MKR1000: http://www.atmel.com/devices/ATSAMW25.aspx
- Intel Curie del Arduino 101: http://www.intel.com/content/dam/support/us/en/documents/boardsandkits/curie/intel-curie-module-datasheet.pdf
- STM32F469BI del STAR-OTTO: http://www.st.com/content/st_com/en/products/microcontrollers/stm32-32-bit-arm-cortex-mcus/stm32f4-series/stm32f469-479/stm32f469bi.html
Dentro de los microcontroladores la tendencia es a usar MCUs de 32 bits con arquitectura ARM. La arquitectura ARM es el conjunto de instrucciones de 32 y 64 bits más ampliamente utilizado en unidades producidas. Concebida originalmente por Acorn Computers para su uso en ordenadores personales, los primeros productos basados en ARM eran los Acorn Archimedes, lanzados en 1987.
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de baja potencia. Como resultado, se han convertido en dominante en el mercado de la electrónica móvil e integrada, encarnados en microprocesadores y microcontroladores pequeños, de bajo consumo y relativamente bajo costo. En 2005, alrededor del 98% de los más de mil millones de teléfonos móviles vendidos utilizaban al menos un procesador ARM. Desde 2009, los procesadores ARM son aproximadamente el 90% de todos los procesadores RISC de 32 bits integrados.
La arquitectura ARM es licenciable. Esto significa que el negocio principal de ARM Holdings es la venta de núcleos IP, estas licencias se utilizan para crear microcontroladores y CPUs basados en este núcleo.
ARM Cortex M es un grupo de procesadores RISC de 32 bits licenciados por ARM Holdings. La web oficial es http://www.arm.com/products/processors/cortex-m. Además existen otras familias de ARM: https://en.wikipedia.org/wiki/List_of_ARM_microarchitectures
Más información:
- https://es.wikipedia.org/wiki/Arquitectura_ARM
- https://en.wikipedia.org/wiki/ARM_architecture
- https://en.wikipedia.org/wiki/ARM_Cortex-M
Para saber más de microcontroladores, ver estos recursos:
- http://learn.mikroe.com/ebooks/microcontroladorespicc/
- http://learn.mikroe.com/ebooks/piccprogramming/
- http://web.ing.puc.cl/~mtorrest/downloads/pic/tutorial_pic.pdf
- http://www.monografias.com/trabajos103/introduccion-microcontroladores/introduccion-microcontroladores.shtml
- Manual PIC http://www.unioviedo.es/ate/alberto/manualPic.pdf
AVR vs PIC:
- http://hackaday.com/2016/06/28/avr-vs-pic-round-223-fight/
- https://hackaday.io/project/11796-avr-vs-pic-the-case-of-the-candle
Esquema lógico de Arduino
El funcionamiento interno de un microcontrolador se puede explicar con un diagrama de bloques o esquema lógico, donde se ven en cada bloque cada unidad interna del microcontrolador y cómo se comunica con el restos de unidades.
Arquitectura de microcontroladores: http://sistdig.wikidot.com/wiki:arquitectura
Diagrama de bloques simplificado de un microcontrolador. Se compone de tres bloques fundamentales: la CPU ( central Processing Unit), memoria (RAM y ROM) y las entrada y salidas. Los bloques se conectan entre sí mediante grupos de líneas eléctricas denominadas buses o pistas. Los buses pueden ser de direcciones (si transportan direcciones de memoria o entrada y salida), de datos (si transportan datos o instrucciones) o de control (si transportan señales de control diversas). La CPU es el cerebro central del microprocesador y actúa bajo control del programa almacenado en la memoria. La CPU se ocupa básicamente de traer las instrucciones del programa desde la memoria, interpretarlas y hacer que se ejecuten. La CPU también incluye los circuitos para realizar operaciones aritméticas y lógicas elementales con los datos binarios, en la denominada Unidad Aritmética y Lógica (ALU: Aritmetic and Logic Unit).

Diagramas de bloques de un microcontrolador PIC:


Diagrama de bloques de un microcontrolador AVR de Atmel, incluido el ATmega328p:


El sistema de reloj determina la velocidad de trabajo del microcontrolador. Con 16 MHZ se ejecuta una instrucción en 62,5 nanosegundos (1/16 Mhz), correspondiente a 1 ciclo de máquina. El microcontrolador tiene diferentes opciones de circuito de reloj tal como lo muestra la siguiente imagen:

En un registro interno del microcontrolador se encuentran 5 opciones diferentes de reloj que son seleccionadas por medio de un Multiplexor. De este multiplexor sale la señal de reloj, la cual pasa a través de un prescaler, este prescaler se puede utilizar para reducir la frecuencia, reducir el consumo de energía y mejorar la estabilidad de la señal de reloj.El factor del prescaler va de 1 a 256, en potencias de 2. En Arduino, por defecto está desactivado, por consiguiente trabaja a la frecuencia del resonador externo.
La señal de reloj es distribuida por la unidad de control a los diferentes bloques existentes: la CPU, las memorias, los módulos de entrada/salida, los contadores/timers, el SPI y la USART, al igual que el conversor Análogo Digital ADC.
El microcontrolador ATmega328 tiene tres timers (timer 0, timer 1, timer 2) que también se pueden usar como contadores. Los timers 0 y 2 son de 8 bits y el timer 1 de 16. Estos timers tienen un módulo de preescalado para su propia señal de reloj que puede provenir de su sistema de reloj interno o por pines externos (modo contador). Son módulos que funcionan en paralelo a la CPU y de forma independiente a ella. El funcionamiento básico consiste en aumentar el valor del registro del contador al ritmo que marca su señal de reloj.
Usando el reloj interno o un cristal externo puede ser utilizado para medir tiempos puesto que utiliza una señal periódica, precisa y de frecuencia conocida; mientras que si la señal viene de un pin externo puede contar eventos que se produzcan en el exterior y que se reflejen en cambios de nivel de tensión de los pines.
Estos contadores también forman parte del generador de señales PWM y permiten configurar tanto la frecuencia como el ciclo de trabajo.
Registros de memoria
Todos los microcontroladores tienen un conjunto de instrucciones que suele ser un conjunto pequeño al tratarse de arquitectura RISC. La CPU cuenta con ese número de instrucciones que sabe ejecutar.
El conjunto de instrucciones para los microcontroladores Atmel de 8 bits es: http://www.atmel.com/Images/Atmel-0856-AVR-Instruction-Set-Manual.pdf
En el caso del ATmega328p, tiene una arquitectura RISC con 131 instrucciones, la mayoría de ellas ejecutadas en un solo ciclo de reloj.

Más información sobre la ALU del Atmega328p en la página 25 de http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf
Los registros son unas zonas concretas de la memoria RAM accesibles directamente desde la CPU o desde otros elementos del microcontrolador que permite hacer operaciones directamente y de forma más rápida.
Trabajar con registros de memoria puede ser difícil si sólo se escribe un programa en lenguaje ensamblador. Al utilizar el lenguaje de programación de alto nivel como es C basta con escribir el nombre del registro y su dirección de memoria, a partir de esa información, el compilador selecciona el registro necesario. Las instrucciones apropiadas para la selección del registro serán incorporadas en el código durante el proceso de la compilación.
Más información: https://en.wikipedia.org/wiki/Processor_register


La memoria RAM en el ATmega328p se divide en varias partes, todos los grupos de registros se ponen a cero al apagar la fuente de alimentación. La SRAM del 328p se distribuye de la siguiente forma:

Las primeras 32 localizaciones de la memoria son el fichero de registros (Register File). Las siguientes 64 localizaciones de memoria es la standard I/O memory y después las 160 siguientes localizaciones son la Extended I/O memory. Por último las siguientes 2K localizaciones son la memoria interna SRAM.
Las 5 diferentes modos de direccionamiento para los datos de memoria son:
- Direct – The direct addressing reaches the entire data space.
- Indirect with Displacement – The Indirect with Displacement mode reaches 63 address locations from the base address given by the Y- or Z-register.
- Indirect – In the Register File, registers R26 to R31 feature the indirect addressing pointer registers.
- Indirect with Pre-decrement – The address registers X, Y, and Z are decremented.
- Indirect with Post-increment – The address registers X, Y, and Z are incremented.
The 32 general purpose working registers, 64 I/O Registers, 160 Extended I/O Registers, and the 2K bytes of internal data SRAM in the device are all accessible through all these addressing modes.
Los registros de propósito general se utilizan para almacenar los datos temporales y los resultados creados durante el funcionamiento de la ALU. Los 32 General Purpose Working Registers están directamente conectados a la ALU, permitiendo ser accedidos dos registros de forma independiente en una sola instrucción ejecutada en un ciclo de reloj.
Six of the 32 registers can be used as three 16-bit indirect address register pointers for Data Space addressing – enabling efficient address calculations. One of the these address pointers can also be used as an address pointer for look up tables in Flash program memory. These added function registers are the 16-bit X-, Y-, and Z-register. Más información en la página 28 de http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf

Para más información ver página 35 de http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf
All I/O locations may be accessed by the LD/LDS/LDD and ST/STS/STD instructions, transferring data between the 32 general purpose working registers and the I/O space. I/O Registers within the address range 0x00-0x1F are directly bit-accessible using the SBI and CBI instructions. In these registers, the value of single bits can be checked by using the SBIS and SBIC instructions
Los I/O registers localizados en las direcciones 0x20 a 0xFF y a diferencia de los registros de propósito general, su propósito es predeterminado durante el proceso de fabricación y no se pueden cambiar. Como los bits están conectados a los circuitos particulares en el chip (convertidor A/D, módulo de comunicación serial, etc), cualquier cambio de su contenido afecta directamente al funcionamiento del microcontrolador o de alguno de los circuitos. Esta es la forma en que a bajo nivel se interactúa por ejemplo con los pines del microcontrolador.
Un resumen de todos los registros I/O del ATmega328p se puede ver en la página 428 de http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf
Registros para:
- ATmega328p: https://www.safaribooksonline.com/library/view/arduino-microcontroller-processing/9781627052535/xhtml/appendixa.html
- ATmega2580: https://www.safaribooksonline.com/library/view/arduino-microcontroller-processing/9781627052535/xhtml/appendixc.html
Más información sobre registros y su uso en:
- http://courses.cs.washington.edu/courses/csep567/10wi/lectures/Lecture6.pdf
- http://www.instructables.com/id/Microcontroller-Register-Manipulation/?ALLSTEPS
- https://en.wikipedia.org/wiki/Special_function_register
- http://www.atmel.com/images/avr_3_04.pdf
- http://learn.mikroe.com/ebooks/microcontroladorespicc/chapter/principales-registros-sfr/
- http://www.monografias.com/trabajos14/micros/micros.shtml
- http://www.unioviedo.es/ate/alberto/manualPic.pdf
Ejercicio: Registros Arduino
Veamos algunos valores de los registros de Arduino con el sketch ShowInfo de http://playground.arduino.cc/Main/ShowInfo
Este sketch dispone de un menú que nos permite hacer varias operaciones, pulsar opción i (Show Information) y t (Timer Register Dump) para ver datos de los registros.
Solución: https://github.com/jecrespo/Aprendiendo-Arduino/tree/master/Ejercicio58-Manipular_Registros
La mayoría de los nuevos chips AVR (utilizados en el Arduino) tienen un sensor de temperatura interno. No suele utilizarse, ya que no es exacta. Sin embargo, hay varias situaciones en las que se puede utilizar este sensor.
La temperatura interna es la temperatura dentro del chip, al igual que la temperatura de la CPU de un ordenador. Si el Arduino no está durmiendo, esta temperatura aumentará. Si los pines de salida se utilizan para dar corriente (por ejemplo encender leds) la temperatura interna aumenta más. Esta temperatura no puede usarse para medir la temperatura ambiente.
En situaciones con altas temperaturas una lectura de temperatura calibrada podría evitar daños. La mayoría de los chips AVR más recientes tienen un rango de temperatura de hasta 85 grados Celsius. El Arduino podría utilizarse para apagarse a 80 grados Celsius.
Más información: http://playground.arduino.cc/Main/InternalTemperatureSensor
Ejecutar el sketch leer y entender lo que hace y probarlo. Comparar con otros Arduinos y calibrar.
Ver en la página 306 y 316 de la documentación del microcontrolador http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf
Solución: https://github.com/jecrespo/Aprendiendo-Arduino/tree/master/Ejercicio58-Manipular_Registros

Pingback: Hardware Arduino a fondo - Microcontroladores y Electrónica