Programación Arduino
El lenguaje de programación de Arduino es C++, aunque es posible programarlo en otros lenguajes. No es un C++ puro sino que es una adaptación que proveniente de avr-libc que provee de una librería de C de alta calidad para usar con GCC (compilador de C y C++) en los microcontroladores AVR de Atmel, denominado avr-gcc, y otras muchas funciones específicas para las MCU AVR de Atmel.
El lenguaje de los AVR es un entorno C para programar los chips de Atmel, la mayor parte del lenguaje o core de Arduino está escrito con constantes y funciones AVR y hay bastantes cosas que no son fáciles de hacer con el lenguaje de Arduino sin el uso de código AVR de la avr-libc.
Como el entorno de Arduino usa GCC para compilar el código, todas las variables de los puertos y de los registros de una MCU de Atmel son soportadas por el IDE de Arduino.
Las herramientas necesarias para programar los microcontroladores AVR de Atmel son avr-binutils, avr-gcc y avr-libc y ya están incluidas en el IDE de Arduino, cuando compilamos y cargamos un sketch estamos usando estas herramientas.
Para usar un microcontrolador ATmega8 de la familia AVR de 8 bits de Atmel, sin usar el IDE de Arduino, podemos programarlos usando C y C++ mediante una versión muy extendida de GCC (http://es.wikipedia.org/wiki/GNU_Compiler_Collection) denominda AVR-GCC http://winavr.sourceforge.net/ y http://sourceforge.net/projects/winavr/files/.
Una vez compilado el programa de C/C++ en un binario para AVR con AVR-GCC, necesitaremos “quemarlo” en el microcontrolador. Esto puede hacerse con AVRDUDE http://www.nongnu.org/avrdude/ o UISP http://www.nongnu.org/uisp/ o Atmel Studio http://www.atmel.com/tools/atmelstudio.aspx
Para Linux son necesarias estas herramientas:
- gcc-avr
- binutils-avr
- gdb-avr
- avr-libc
- avrdude
Más información: http://playground.arduino.cc/Main/AVR
Un ejemplo de uso de funciones AVR que no dispone el entorno de Arduino es cuando queremos hacer delays muy pequeños. La función delayMircoseconds() puede hacer el delay más pequeño con el lenguaje de Arduino que es de 2 microsegundos.
Para delays menores es necesario usar ensamblador y en concreto la función ‘nop’ (no operation. Cada llamada a ‘nop’ ejecuta un ciclo de reloj que para 16 MHz es un retraso de 62,5 ns.
__asm__(«nop\n\t»);
__asm__(«nop\n\t»»nop\n\t»»nop\n\t»»nop\n\t»); \\ gang them up like this
También como hemos visto anteriormente, manipular los puertos y pines con el código AVR es más rápido que usar digitalWrite(). Más información https://www.arduino.cc/en/Reference/PortManipulation
Otro ejemplo es el uso de los métodos AVR cbi y sbi que se usan para hacer set o clear de bits el PORT y otras variables. Puedes encontrar estos métodos de código AVR en muchos sitios y ambos deben ser definidos en el sketch de Arduino para ser usados. Pegar este código al inicio del sketch y para usarlo simplemente poner una variable del puerto y el pin para hacer set o clear.
#ifndef cbi
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#endif
#ifndef sbi
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
#endif
Pero para programar el 99% de lo que necesitemos en proyectos sencillos con Arduino, todo esto se puede resumir en que para programar nuestro lenguaje de programación de Arduino es el “Arduino Reference”, que es donde debemos recurrir para cualquier duda de programación que surja. Puesto que Arduino provee de unas librerías que facilitan la programación del microcontrolador. http://arduino.cc/en/Reference/HomePage
A medida que nuestro programa se hace más complejo o necesitamos que sea más rápido o queremos que tenga un uso de memoria más eficiente, entonces es cuando tendremos que recurrir a los comando AVR de la avr-libc.
El gran éxito de Arduino en parte se debe a que el IDE nos permite programar una MCU sin tener que saber todo lo anterior y nos da unas herramientas sencillas y específicas para programar los microcontroladores que suministra en sus placas. Por ejemplo veamos las funciones que nos ofrece para comunicar por el puerto serie: http://arduino.cc/en/Reference/Serial
El IDE de Arduino está basado en Processing: https://processing.org/, es un lenguaje de programación y entorno de desarrollo integrado de código abierto basado en Java, de fácil utilización, y que sirve como medio para la enseñanza y producción de proyectos multimedia e interactivos de diseño digital.
La librería Arduino está basada en wiring: http://wiring.org.co/ y es de donde nacieron las funciones que conocemos como digitalRead(), Serial.println(), etc…
Web del proyecto de Proccesing: https://processing.org/
Processing en github: https://github.com/processing/processing
![]()
Web del proyecto Wiring: http://wiring.org.co/
Wiring en github: https://github.com/WiringProject
Processing es útil cuando queremos comunicar Arduino con un ordenador y mostrar datos o guardar datos, pero también podemos usar python, .NET o cualquier otro lenguaje de programación que conozcamos.
Arduino trae algunos ejemplos para trabajar con Processing en el apartado communication, por ejemplo para hacer una gráfica de datos en http://arduino.cc/en/Tutorial/Graph
Ver el reference y la librería Serial de processing: https://processing.org/reference/ y https://processing.org/reference/libraries/serial/
También disponemos de una librería de Arduino para processing que nos permite interactuar entre processing y arduino: http://playground.arduino.cc/interfacing/processing
Por supuesto Arduino se puede programar en otros lenguajes y desde otros entornos de programación. Cabe destacar scratch como un lenguaje visual que hace innecesario saber programación o Atmel Studio que es la herramienta que proporciona Atmel. Más información en: https://aprendiendoarduino.wordpress.com/2014/11/20/tema-4-conceptos-basicos-de-programacion/
Más información: http://wittyrobo.com/mcu328p/c01_p01.html
Fuses
Los fuses son una parte muy importante en la programación de un microcontrolador. Solo es necesario configurarlos una vez, pero si no se hace correctamente podemos tener problemas.
Ya sabemos lo que es la flash, EEPROM y RAM como parte de la MCU, pero no se ha mencionado anteriormente que hay 3 bytes de memoria permanente llamados fuses. Los fuses determinan cómo se va a comportar el microcontrolador, si tiene bootloader, a que velocidad y voltaje va a funcionar, etc… Notar que a pesar de llamarse fuses (fusibles) puede configurarse una y otra vez y no tienen nada que ver con la protección de sobrecorrientes.
Los fuses están documentados en los datasheets, para el Arduino UNO ver página 348 de http://www.atmel.com/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_datasheet.pdf
Con los fuses seleccionamos el comportamiento de:
- Clock Source: puede ser un reloj externo, un reloj interno o un cristal externo.
- Clock Startup: es el tiempo que necesita la fuente de reloj para estabilizarse.
- Clock Output: habilita una salida de reloj en el PORT C2
- Clock Divide: Divide por 8 el reloj
- Reset Disable: convierte el pin de reset en un pin normal, habilitar este fuse hace que no se pueda programar por ISP
- Brown-out Detect (BOD): selecciona a que voltaje hace disparar la protección de brownout. Para una MCU brownout es el voltaje al que es demasiado bajo para que funcione de una forma fiable a la velocidad de reloj.
- Selecciona si se usa bootloader o no.
- Selecciona cuánta memoria se reserva para el bootloader
- Deshabilitar programación por el puerto serie
Con los fuses podemos bloquear algunos aspectos importamte de la MCU y podríamos brickearlo.
Los 3 bytes de los fuses son:
- low byte fuse
- high byte fuse
- extended fuse
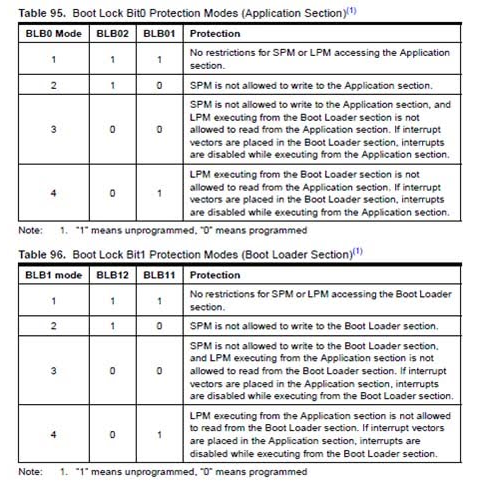
También hay un cuarto byte que se usa para programar los lock bits. Los lock bits pueden ser usados para restringir la lectura/escritura en la memoria de programa (flash), la zona de boot y la de aplicación tienen sus propios lock bits y es posible controlar el acceso a ellos de forma separada.
Para los fuses el 1 significa no usado y 0 usado.
Low Byte Fuses

High Byte Fuses

Extended Fuse Bits

Los valores por defecto el ATmega328p son:
- Low fuse = 0x62 (B01100010)
- High fuse = 0xD9 (B11011001)
- Extended fuse = 0xFF (B11111111)

Los valores de los fuses de Arduino con el ATmega328p son:
- Low fuse = 0xFF (B11111111)
- High fuse = 0xDA (B11011110)
- Extended fuse = 0x05 (B00000101)

En caso de usar el Optiboot bootloader, cambia el valor en el high byte fuse porque el tamaño del bootloader es inferior.

Más información de cada fuse en: http://www.martyncurrey.com/arduino-atmega-328p-fuse-settings/
Pero la mejor forma de ver los fuses es examinar AVR fuse calculator: http://www.engbedded.com/fusecalc/
Luego con los datos de los 3 bytes de los fuses, se pasan como argumento en el avr-dude al cargar el sketch y configurar los fuses. La configuración de los fuses es parte del proceso de cargar un bootloader. Editando el fichero boards.txt en la carpeta del IDE de Arduino en la ruta C:\Program Files (x86)\Arduino\hardware\arduino\avr se puede configurar el valor de los fuses.
Discusion en foro sobre el uso de fuses para proteger el binario de un sketch: http://www.todopic.com.ar/foros/index.php?topic=44794.0. Es tan simple como agregar «-Ulock :w:03c:h» al final del comando que se le envía a avrdude.exe. Se configuran los lock bits como 1100 0011 (ojo que cambian los bits más significativos y menos significativos)


Cargar un programa desde el ide de arduino al microcontrolador. Luego desde el programa que mencionado ejecutar el mismo comando enviado por el ide de arduino a avrdude, pero cambiando la ruta del archivo .hex por un programa distinto y agregando al final «-Ulock :w:03c:h» Avrdude muestra en pantalla el avance en el proceso, pero al tratar de verificar el archivo enviado con el que recibe del microcontrolador, la comprobación falla. El microcontrolador se reinicia y ejecuta el programa nuevo correctamente, lo que demuestra que el Arduino no entregará el programa y que avrdude no es capaz de extraerlo del microcontrolador, ni tampoco con esta configuración es posible cargar ningún programa.
Ver el estado de los fuses de un Arduino se puede hacer con avr-dude y un programador, para ello hay que ejecutar el comando “avrdude -c arduino -p m328p -P COM3 -b 19200 -v”
Con AVR studio se puede leer y escribir los valores de los fuses. Pero si queremos cambiar los valores de los fuses con el IDE de Arduino podemos hacerlo de dos formas:
- Option 1. El “quemado del bootloader” configura los fuses. Para configurar los fuses el ATmega328p se puede hacer en el proceso de cargar bootloader y toma la configuración de los fuses que hay en el fichero boards.txt de la placa correspondiente.
- Option 2. Configurar los fuses manualmente, sin cargar un bootloader. Para ello necesitaremos la herramienta avr-dude mediante el comando.
“avrdude -c stk500v2 -p m328p -P /dev/ttyACM0 -b 19200 -U lfuse:w:0xFF:m -U hfuse:w:0xDE:m -U efuse:w:0x05:m”
Más información en:
- http://ladyada.net/learn/avr/fuses.html
- http://www.martyncurrey.com/arduino-atmega-328p-fuse-settings/
- Como cambiar los fuse bits a un ATmega328p: http://www.instructables.com/id/How-to-change-fuse-bits-of-AVR-Atmega328p-8bit-mic/?ALLSTEPS
- https://voidyourwarranty.wordpress.com/2014/08/17/using-arduino-as-an-isp-to-program-a-standalone-atmega-328p-including-fuses/
- http://www.hackersworkbench.com/intro-to-bootloaders-for-avr
- http://www.radiolocman.com/review/article.html?di=148456
IDE Arduino
El IDE de Arduino es open source y por lo tanto tenemos su código fuente y también podemos hacer nuestra propia versión del IDE. El proyecto del IDE de Arduino en github es: https://github.com/arduino/Arduino y las instrucciones para construir el binario desde el fuente está en https://github.com/arduino/Arduino/wiki/Building-Arduino
El software de Arduino se puede descargar en https://www.arduino.cc/en/Main/Software
Para actualizar Arduino y mantener las configuraciones, en Windows simplemente ejecutar el instalador, este desinstala la versión anterior y mantiene las librerías y sketchs siempre y cuando no hayamos guardado o modificado algo en el directorio de instalación.
También es posible tener varias versiones del IDE instaladas, simplemente usar la instalación manual con el archivo .zip
Para añadir al IDE Arduino soporte de placas de terceros: https://learn.adafruit.com/add-boards-arduino-v164?view=all
Lista no oficial de placas de terceros soportadas por el IDE de Arduino:
https://github.com/arduino/Arduino/wiki/Unofficial-list-of-3rd-party-boards-support-urls#list-of-3rd-party-boards-support-urls, que son ficheros json para añadir en el IDE y dar soporte con el nuevo gestor de placas.
Ruta donde se instalan los cores: C:\Users\enrique\AppData\Local\Arduino15\packages
La explicación de cada parámetro en configuración IDE: https://code.google.com/archive/p/arduino/wikis/Platforms.wiki, en la ruta: C:\Program Files (x86)\Arduino\hardware\arduino\avr
- boards.txt: The Arduino environment supports multiple target boards with different chips (currently, only AVRs), CPU speeds, or bootloaders. These are defined in boards.txt. A board is specified by multiple variables prefixed with the same keyword (shown here as BOARD). The file consists of multiple lines with the format key=value. Lines that start with a # are comments and ignored.
- programmers.txt: Programmers may be specified in the programmers.txt file in a platform. This file has a format similar to the boards.txt file, but with the other variables.
- The bootloaders sub-folder of a platform contains the bootloaders for the boards in the platform. These should appear as .hex files in a sub-folder of the bootloaders folder. Often, the source code for the bootloader is also included, along with a Makefile for building the .hex file.
- A core is a set of .c, .cpp, and .h files that implement the basic Arduino functions for a platform. Each core appears as a sub-folder of thecores sub-folder of a platform.
Guia para cambiar estilo IDE Arduino:
- Dark Theme: https://github.com/jeffThompson/DarkArduinoTheme
- http://www.jeffreythompson.org/blog/2013/01/15/dark-arduino-ide/
- http://mitat.tuu.fi/?p=117
AVR libc
Es posible usar comandos estándar de C++ en la programación de Arduino siempre que estén incluidos en el avr libc, así como otros comandos propios para las MCUs AVR tambiñen incluidos en en avr-libc:
- Reference: http://www.atmel.com/webdoc/AVRLibcReferenceManual/
- Toolchain: http://www.atmel.com/webdoc/AVRLibcReferenceManual/overview.html
- Módulos http://www.atmel.com/webdoc/AVRLibcReferenceManual/ch20.html
- Standard Library: http://www.atmel.com/webdoc/AVRLibcReferenceManual/group__avr__stdlib.html
- String Module: http://www.atmel.com/webdoc/AVRLibcReferenceManual/group__avr__string.html
- Tratamiento de la memoria de la MCU por avr-libc: http://www.atmel.com/webdoc/AVRLibcReferenceManual/malloc_1malloc_intro.html
- Free software project: http://www.nongnu.org/avr-libc/ y http://savannah.nongnu.org/projects/avr-libc/
- Módulos de open source project: http://www.nongnu.org/avr-libc/user-manual/modules.html
Dispositivos soportados por avr-libc: http://www.atmel.com/webdoc/AVRLibcReferenceManual/index_1supp_devices.html
Cuando creamos un programa en Arduino, automáticamente carga varios módulos como stdlib.h, math.h, etc…
Por ejemplo math.h:
El equivalente para linux de avr-libc es la glibc:
- http://www.gnu.org/software/libc/index.html
- manual: https://www.gnu.org/software/libc/manual/html_node/index.html
- Wiki: https://sourceware.org/glibc/wiki/HomePage
glibc como se puede ver tiene versiones para diferentes arquitecturas de los ordenadores como i386, i686, etc… para usar las instrucciones de cada una de sus arquitecturas.
Más información sobre MCUs AVR:
WinAVR
WinAVR es una herramienta importante para el desarrollo de MCUs AVR, incluso después de instalar Atmel Studio como IDE, es recomendable instalar WinAVR.
WinAVR (pronunciado “whenever”) es una suite compuesta de herramientas de desarrollo opensource para los microcontroladores AVR sobre plataforma Windows. Incluye el compilador GNU GCC para C y C++.
Herramientas WinAVR:
- avr-gcc (compiler)
- avrdude (programmer)
- avr-gdb (debugger)
- avr-libc (with a good HTML help Documentation)
- and more …..
Web del proyecto:
Más información:
- FAQ de avr-libc: http://www.nongnu.org/avr-libc/user-manual/FAQ.html
- Tutorial AVR: http://ladyada.net/learn/avr/index.html
- http://winavr.scienceprog.com/
Tutoriales de programación AVR:
- http://ocw.mit.edu/courses/media-arts-and-sciences/mas-962-special-topics-new-textiles-spring-2010/readings-lectures-tutorials/tut06_avr1/
- http://ocw.mit.edu/courses/media-arts-and-sciences/mas-962-special-topics-new-textiles-spring-2010/readings-lectures-tutorials/tut06_avr2/
- Tutoriales para trabajar con AVR: http://playground.arduino.cc/Main/TutorialList#AVR
Interesante información sobre avr-lib en Wiring y Arduino: https://ccrma.stanford.edu/~juanig/articles/wiriavrlib/wiriavrlib.html
Proceso de compilación
GCC es un conjunto de compiladores que se considera el estándar para los Sistemas Operativos derivados de UNIX y requiere de un conjunto de aplicaciones conocidas como binutils que son unas herramientas de programación para la manipulación de código de objeto.
GCC soporta varios lenguajes y diferentes arquitecturas de HW::
- Proyecto GCC: https://gcc.gnu.org/
- Como usar GCC: https://gcc.gnu.org/onlinedocs/gcc/
- Wiki GCC: https://gcc.gnu.org/wiki/HomePage
- Lenguajes soportados por GCC: https://gcc.gnu.org/onlinedocs/gcc/G_002b_002b-and-GCC.html
- HW options: https://gcc.gnu.org/onlinedocs/gcc/Submodel-Options.html
- AVR options: https://gcc.gnu.org/onlinedocs/gcc/AVR-Options.html
- ARM options: https://gcc.gnu.org/onlinedocs/gcc/ARM-Options.html
- Ensamblador en C: https://gcc.gnu.org/onlinedocs/gcc/Using-Assembly-Language-with-C.html
- Instrucciones de instalación de avr-gcc: http://www.akafugu.jp/posts/resources/avr-gcc/
Como GCC está construido para ejecutarse en un sistema como Linux, Windows o mac OS, pero para generar código para un microcontrolador AVR, entonces se denomina avr-gcc que es una versión de GCC solo para arquitecturas AVR. avr-gcc es el compilador que usa el IDE de arduino para convertir el sketch en C++ a un fichero binario (.hex) que es el que se carga en la flash del MCU y que ejecuta.
avr-gcc se puede usar directamente o a través de un IDE como el de Arduino o el Atmel Studio.
En el caso de Arduino el proceso de construcción para que el código escrito llegue a la placa es el siguiente:
- El IDE verifica el código y comprueba que la sintaxis del código es correcta en C y C++
- Luego pasa al compilador avr-gcc, que convierte el código en C++ en instrucciones que entiende el microcontrolador.
- Después el código es combinado con las librerías estándar de Arduino, que son las que ofrecen las funciones básicas como digitalWrite() o Serial.println().
- El resultado es un fichero hex que contiene los bytes que van a ser grabado en la memoria flash de Arduino.
- Finalmente el fichero es cargado en la placa Arduino transmitiendolo sobre el USB o la conexión serie si hay un bootloader cargado o sino con un hardware externo (programador).
Cuando un sketch contiene múltiples ficheros, es compilado y los ficheros con extensiones .c o .cpp se compilan de forma separada y los ficheros con otras extensiones se concatenan juntos al fichero del sketch principal antes de pasarlo al compilador. Para usar ficheros con extensión .h, es necesario incluirlos con #include usando “comillas dobles” y no <>
El entorno de Arduino, antes de compilar también hace algunas modificaciones como añadir al principio del sketch #include «Arduino.h». También el entorno de Arduino busca las definiciones de las funciones en el sketch principal y crea las declaraciones (prototypes) para ellas, estas se insertan después de los comentarios y las directivas de preprocesamiento, pero antes del resto de código, esto significa que si se quiere usar un tipo de dato como argumento de una función, debe declararse dentro de un fichero de cabecera separado.
El entorno de Arduino soporta múltiples placas con diferentes MCUs (no solo AVR), todo los datos de la placa están definidos en el fichero boards.txt en C:\Program Files (x86)\Arduino\hardware\arduino\avr. A la hora de compilar las opciones se toman del fichero boards.txt en la opción de build.
Cuando se compila desde el IDE de Arduino cono avr-gcc, las rutas donde se busca cuando se hace un include son:
- El directorio del core de la placa <ARDUINO>/hardware/core/<CORE>/
- El directorio de avr include <ARDUINO>/hardware/tools/avr/avr/include/
- Cualquiera de los directorios de librerías <ARDUINO>/hardware/libraries/ o C:\Users\<USER>\Documents\Arduino\libraries
Cuando un sketch se verifica, se genera el fichero compilador en un directorio temporal del SO. Todos los ficheros .c y .cpp son compilados y la salida es un fichero .o (object file), tanto el del sktech final como otros que haya en el directorio del sketch o los de las librerías incluidas. Los fichero .o son enlazados todos juntos en una librería estática y el fichero del sketch principal. Solo las partes de las librerías necesitadas para el sketch son incluidas en el fichero final .hex, reduciendo el tamaño de la mayoría de los sketches.
El fichero .hex es la salida final de la compilación y es cargado en la memoria flash de Arduino. Este .hex es cargado en Arduino mediante avrdude y este proceso es controlado por las variables de las placas en el fichero de boards.txt dentro de las opciones “upload”
Para que me guarde los hex en una carpeta concreta: http://forum.arduino.cc/index.php?topic=142706.0
Durante el proceso de compilación se genera un fichero intermedio con extensión .elf que contiene el código máquina y otra información relacionado con información de la memoria y debug. El fichero elf (Executable and Linking Format), es el formato estándar para ficheros ejecutables, objetos de código y librerías compartidas. Elf es como una dll y consiste en unos enlaces simbólicos y tablas que pueden cargarse en una zona de memoria. Los fichero elf tienen varias secciones como datos, textos, etc.. Este fichero se suele usar para debug con emuladores.
Durante el proceso de compilación y carga, el IDE de Arduino muestra mucha información (hay que activarlo antes, ver https://aprendiendoarduino.wordpress.com/2016/06/26/instalacion-software-y-configuracion/) que puede resultar de ayuda para saber lo que está pasando durante el proceso. La herramienta que convierte el fichero .elf a .hex es avr-objcopy.
Más información:
- http://arduino.cc/en/Hacking/BuildProcess
- https://balau82.wordpress.com/2011/03/29/programming-arduino-uno-in-pure-c/
- http://openhardwareplatform.blogspot.com.es/2011/03/inside-arduino-build-process.html
- Formato Intel HEX https://en.wikipedia.org/wiki/Intel_HEX
- Arduino en línea de comandos: http://www.mjoldfield.com/atelier/2009/02/arduino-cli.html y http://johanneshoff.com/arduino-command-line.html
- makefile para sketches Arduino: https://github.com/sudar/Arduino-Makefile/
Cómo compilar un sketch de Arduino con makefile:
- http://hardwarefun.com/tutorials/compiling-arduino-sketches-using-makefile
- https://github.com/sudar/Arduino-Makefile
- http://sudarmuthu.com/blog/why-you-should-open-source-your-next-pet-project/
- http://stackoverflow.com/questions/13260508/using-the-arduino-libraries-for-regular-avr-code
Opciones de compilación:
- http://www.atmel.com/webdoc/AVRLibcReferenceManual/using_tools_1using_sel_gcc_opts.html
- http://www.atmel.com/webdoc/AVRLibcReferenceManual/using_tools_1using_avr_gcc_mach_opt.html
Esta imagen muestra todo el proceso:

Información sobre las binutils: http://www.atmel.com/webdoc/AVRLibcReferenceManual/overview_1overview_binutils.html
Arduino también nos ofrece la posibilidad de una herramienta de línea de comandos para compilar los sketches de Arduino llamada Arduino Builder: https://github.com/arduino/arduino-builder, siendo uan herramienta muy intersante para hacer integración continua https://github.com/arduino/arduino-builder/wiki/Doing-continuous-integration-with-arduino-builder o testeo de nuestro softwatre (TDD).
También hay interfaces gráficos para GCC:
- http://www.instructables.com/id/Simple-Graphic-Interface-for-Linux-GCC-Compiler/?ALLSTEPS
- Compilar usando GCC desde visual studio: http://www.instructables.com/id/Compile-Using-GNU-GCC-from-Visual-Studio/?ALLSTEPS
Probar/Ejercicio: El compilador de avr-gcc cuando detecta lineas iguales de Serial.print() no aumenta la memoria del static data porque lo reconoce y la guarda una sola vez en RAM y la repite al llamarla. Tampoco aumenta el tamaño del hex.
Ensamblador
Ensamblador es un lenguaje de bajo nivel. Consiste en una lista de instrucciones que no son de ninguna manera comparable a cualquier otro lenguaje como C, Basic o Pascal. El AVR tiene alrededor de 130 instrucciones, dependiendo del tipo, periféricos y tamaño del microcontrolador. En este link está el manual de las instrucciones con su respectiva explicación, y en este otro link se encuentra la guia de usuario de AVR Assembler. Se puede encontrar más información en http://www.avrbeginners.net/ y en http://www.avrfreaks.net/
Como ya hemos visto Arduino podemos programarlo en C puro, pero también podríamos programarlo en ensamblador, aunque no es una opción recomendable. Sin embargo como veremos podremos obtener el código en ensamblador de nuestro sketch.
Sin embargo, podría ser útil en determinadas situaciones insertar código en ensamblador dentro de nuestro sketch de Arduino. El compilador GNU C para procesadores Atmel AVR RISC procesadores permite incrustar el código de lenguaje ensamblador en programas C. Esta característica se puede utilizar para optimizar manualmente las partes críticas de tiempo del software o utilizar una instrucción de procesador específico, que no están disponibles en el lenguaje C.
Las instrucciones de cada procesador se pueden ver en los datasheet correspondientes y para el caso de los AVR de 8 bit en:
- http://www.atmel.com/Images/Atmel-0856-AVR-Instruction-Set-Manual.pdf
- Instrucciones de código máquina o ensamblador de los MCU AVR: http://www.atmel.com/webdoc/avrassembler/avrassembler.wb_instruction_list.html
AVR Assembler User Guide: http://www.atmel.com/Images/doc1022.pdf
Para insertar instrucciones de ensamblador en C ver: Inline assembler cookbook: http://www.nongnu.org/avr-libc/user-manual/inline_asm.html, simplemente poner en el código C la instrucción asm volatile(); pasando como parámetro el código entre comillas.
Más información:
- http://www.atmel.com/webdoc/avrassembler/
- http://www.atmel.com/webdoc/avrassembler/avrassembler.wb_Syntax.html
- http://www.avr-asm-download.de/beginner_en.pdf
Proceso de Carga del Sketch
Una vez compilado y obtenido el fichero binario, hay que cargarlo en la memoria flash de Arduino, para ello el IDE de Arduino usa una herramienta llamada avr-dude.
Cuando tenemos problemas al cargar un sketch de Arduino, el problema suele venir de avrdude y en este enlace habla de los problemas y sus soluciones http://elcajondeardu.blogspot.com.es/2016/03/avrdude-nos-lo-explica-rufian-rufian-en.html
Página del proyecto avr-dude:
Manual del AVRdude:
- http://www.nongnu.org/avrdude/user-manual/avrdude_1.html
- http://mirrors.fe.up.pt/pub/nongnu//avrdude/avrdude-doc-5.10.pdf
- https://omegav.no/wiki/index.php/AVR/avrdude
Hay versiones con GUI para avr-dude que nos permiten cargar el sketch con la opciones que queramos.
- AVRDRDESS: http://blog.zakkemble.co.uk/avrdudess-a-gui-for-avrdude/ y https://blog.adafruit.com/2013/02/19/avrdudess-a-gui-for-avrdude/
- avrdude-gui: https://sourceforge.net/projects/avrdude-gui/
- Introducción a avrdude GUI http://embeddedtechi.blogspot.com.es/2016/06/introduction-to-avrdude-gui.html
Usar avr-dude con atmel studio y Arduino: http://wittyrobo.com/mcu328p/c04_p01.html
Uso de Arduino uploader:
- http://arduinodev.com/arduino-builder-tutorial/
- http://arduinodev.com/arduino-uploader/
- code: https://github.com/stanleyhuangyc/ArduinoUploader
- ejecutable https://sourceforge.net/projects/arduinodev/
Tutorial para usar AVRdude:
- http://www.ladyada.net/learn/avr/avrdude.html
- https://learn.adafruit.com/usbtinyisp/avrdude
- https://learn.sparkfun.com/tutorials/pocket-avr-programmer-hookup-guide/using-avrdude
- https://learn.adafruit.com/introducing-trinket/programming-with-avrdude
Adicionalmente se disponen de otras herramientas para la MCUs de AVR:
- simulavr, en un simulador para MCUs de AVR http://savannah.nongnu.org/projects/simulavr/
- GDB, es un debugger http://www.sourceware.org/gdb/
- AVaRICE, es un programa para hacer interfaz entre GDB y el AVR JTAG ICE https://sourceforge.net/projects/avarice/ y http://avarice.sourceforge.net/
Soporte a tarjetas no oficiales con IDE Arduino
Al igual que hemos visto las herramientas necesarias para programar los microcontroladores AVR de Atmel y que necesitamos de una librería avr-libc, un compilador avr-gcc y un programa para cargar el .hex al microcontrolador, lo que compone el soporte en el IDE de Arduino para estos microcontroladores, en caso de querer programar otras MCUs, necesitaremos instalar las correspondientes herramientas para estos microcontroladores.
El proceso de dar soporte a otras tarjetas/microcontroladores en el IDE de Arduino se ha facilitado mucho, disponiendo de unos ficheros json que se descarga el IDE de Arduino y con ellos el IDE se descarga las herramientas necesarias y configura el IDE de Arduino para esas MCUs.
Instalar soporte IDE a otras placas:
- Directorio donde se guarda el core de Arduino C:\Program Files (x86)\Arduino\hardware
- Instalar soporte para ESP8266: https://github.com/esp8266/Arduino
- Listado de URLs para soporte de tarjetas no oficiales: https://github.com/arduino/Arduino/wiki/Unofficial-list-of-3rd-party-boards-support-urls
- Ruta donde se guarda el core instalado: C:\Users\<USER>\AppData\Local\Arduino15\packages que es lo mismo que meterlo en C:\Program Files (x86)\Arduino\hardware pero se hace para que no lo machaque la actualizar el IDE de Arduino.
IMPORTANTE: especificaciones de formato a usar en el IDE de Arduino para soporte de nuevas placas: https://github.com/arduino/Arduino/wiki/Arduino-IDE-1.5-3rd-party-Hardware-specification
Arduino ARM
Por ejemplo las herramienta usadas por Arduino para las placas basadas en microcontroladores ARM como el Arduino MKR1000, son las GNU ARM Embedded Toolchain https://launchpad.net/gcc-arm-embedded que es mantenido por los empleados de ARM. Usa gcc y newlib: https://sourceware.org/newlib/ y accesible el codigo fuente vía git en https://sourceware.org/git/gitweb.cgi?p=newlib-htdocs.git y git://sourceware.org/git/newlib-cygwin.git
Para programar la flash en los microcontroladores Atmel ARM de la familia SAM usar BOSSA: http://www.shumatech.com/web/products/bossa y su código fuente está en https://sourceforge.net/p/b-o-s-s-a/code/ref/master~/
También se usa otra herramienta llamada OpenOCD (Open On-Chip Debugger) http://openocd.org/ y ofrece soporte a la programación y debug, soportando muchos hardware debuggers.
Documentación: http://openocd.org/documentation/
Código fuente: https://sourceforge.net/p/openocd/code/ci/master/tree/

Gracias, hace tiempo quería saber que había bajo el IDE de Arduino.
Me gustaMe gusta
Pingback: Memoria Arduino | Aprendiendo Arduino
Saludos, alternativamente en Linux existe una herramienta reciente que te permite programar cualquiera de las placas arduino compatibles desde la linea de comandos, así que no necesitas andar lidiando con makefiles ni nada por el estilo.
Solo coger tu editor de preferencia e instalar amake (así se llama la herramienta/soft) y configurar tu editor para que compile y suba el código…
El soporte es inmejorable: todas las placas soportadas por el fabricante y por terceros, todos las librerías compatibles y todos los tipos de programadores.
El secreto es que usa el mismo modo de linea de comandos del Arduino IDE con algunas mejoras y simplificaciones, por lo que todo lo que instales (boards/librerías/programadores) en el Arduino IDE estará disponible.
Puedes visitar la página del proyecto y probarlo en https://github.com/pavelmc/amake aunque está en ingles el autor es hispanohablante nativo, así que no dudes en preguntar.
Para verificar/compilar:
amake -v [placa] [fichero]
Para subir a la placa:
amake -u [placa] [fichero] [puerto_serie]
Todos los parámetros son solo exigidos la primera vez, una vez que lo compilas satisfactoriamente el cachea los resultados.
Además se implementan una solución de detección que hará que casi nunca debas teclear el puerto serie para subir pues el lo auto detectará.
Saludos.
Me gustaLe gusta a 1 persona